|
Реферат: Основы конструированияОсевая жесткость привода оказывает влияние на виброустойчивость. Чтобы исключить резонансные явления, собственную частоту колебаний механической части привода f = (3...3,5) f1 , где f1 – частота импульсов, вырабатываемых системой измерения перемещений. Для крупных станков f1 = 10...15 Гц для средних и малых f1 = 15...25 Гц. Исходя из условия f = (3...3,5) f1 ,потребная жесткость механической части привода j = 4 * 10–6 * p2 * f2 * m (Н/мкм) , где m – масса узлов механической части привода (ходового винта, исполнительного узла и установленных на нём приспособлений, заготовки), кг. Жесткость шарико-винтового механизма (с предварительным натягом и возвратом шариков через вкладыши при r1/r2=0,96) :
где Кd = 0,3...0,5 – коэффициент учитывающий погрешности изготовления резьбы гайки , а также жесткость стыков винтового механизма; U – число витков резьбы в гайке; d0 – номинальный диаметр винта , мм; р – шаг резьбы , мм;
сённая к одному шарику , где Кz = 0,7...0,8 – коэффициент учитывающий погрешности изготовления резьбы винта ; Z1 – рабочее число шариков в одном винте; a – угол контакта шариков с винтом и гайкой; b – угол подъёма резьбы. Наименьшая жесткость ходового винта зависит от способа установки его на опорах.
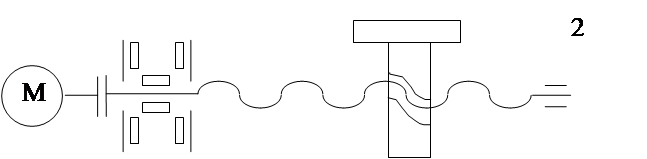
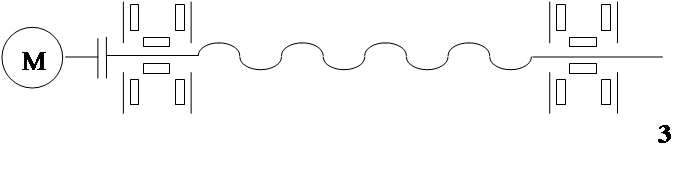
¬–одностороннее закрепление; –с дополнительной опорой. ® Приближенное значение жесткости опор винта j0=ed0 , H/мкм , где е=5,10,10 соответственно д/РУ ,шариковых и роликовых опор. d0 –гарантирует осевую жесткость привода
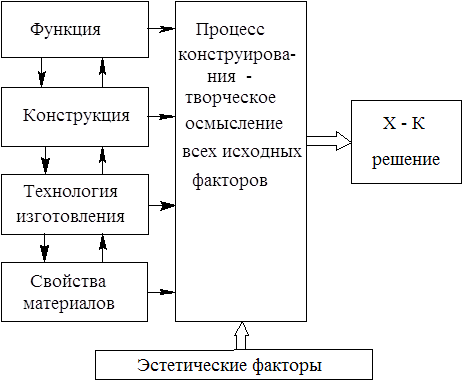
Лекция 15. "Основы конструирования" Основы художественного конструирования. До сих пор мы говорили об инженерном конструировании : Инженер–конструктор обеспечивает взаимодействие узлов и деталей машины, её высокие эксплуатационные характеристики , максимальный КПД минимальную материалоёмкость ( при оптимальной прочности и жёсткости ) и высокий уровень технологичности . Художественное конструирование ( design ) возникло в среде инженерного конструирования в связи с развитием массового производства изделий , непосредственно предназначенных для использования человеком , а также в связи с общим повышением потребительских требований к качеству промышленных изделий . Иначе говоря , промышленные изделия , прошедшие Художественно–конструкторскую разработку должны быть полезными и красивыми . Поэтому художник–конструктор обеспечивает ,– зрительную целостность формы изделия, – правильное выражение в форме изделия его назначения и способа его эксплуатации , – соответствие (соразмерность ) изделия человеку , – отражение в форме изделия признаков господствующего в настоящий момент стиля в формообразовании изделий данного вида . Художественное конструирование – комплексная междисциплинарная конструкторско– художественная деятельность , интегрирующая в себе элементы естественно–научных , технических , гуманитарных знаний , инженерного конструирования и художественного мышления . Центральная проблема Дизайна – создание предметного мира , эстетически оцениваемого как «соразмерный» , «гармоничный» , «целостный» . Дизайнер создаёт такие продукты и орудия труда , которые сами получают способность «по–человечески относиться к человеку» , т.е. обладают эстетической ценностью . Конструирование ( проектирование ) промышленного изделия лишь тогда приводит к желаемому результату , когда конструктор , технолог и дизайнер работают в тесном творческом контакте и когда каждый из них хорошо понимает задачу другого и её значение . Цель изучения Основы Художественного Конструирования – получение минимальных теоретических знаний в области дизайна .
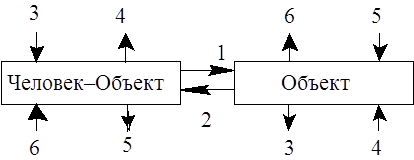
Мы рассмотрим такие вопросы : элементы инженерной психологии и эргономики ; основы композиции и цветоведения ; элементы промышленной эстетики . Техническая эстетика – теория дизайна , изучающая особенности художественной деятельности в сфере техники . Эта отрасль общей эстетики обобщает практику массового изготовления орудий труда (станков , машин ) и других предметов , сочетающих в себе утилитарные (практически полезные ) и эстетические качества , т.е. – законы красоты , действующие в промышленном производстве . * é Эстетика ( общая) – наука об [ национально , классово ,] исторически обусловленной сущности общечеловеческих ценностей , их создании , восприятии , оценки и освоении . Это– философская наука о наиболее общих принципах освоения мира по законам красоты .... º û º теория искусства . Инженерная психология – отрасль психологии , изучающая закономерности процессов информационного взаимодействия человека и техники .Данные этой науки используются для проектирования , производства и эксплуатации систем «человек– машина» и систем «человек–машина–среда». Эргономика ( от греческого ergon – работа и nomos – закон ) – научная дисциплина , комплексно изучающая человека ( группу людей ) в конкретных условиях его (их) трудовой деятельности с использованием технических средств . Цель Эргономики – оптимизация предметного содержания , орудий , условий и процессов труда , повышение привлекательности и удовлетворенности трудом . Промышленная эстетика ( искусство ) – весь предметный мир , создаваемый человеком средствами промышленной техники по законам красоты и функциональности . Элементы Промышленной эстетики : промышленный интерьер ; промышленная графика ( товарные и фирменные знаки ) ; реклама; тара и упаковка . Система « Человек – машина » [ «Человек–машина–среда»] .Человек ( человек– оператор ) занимает основное место в управлении созданной им техникой . Технические средства помогают человеку усиливать его возможности с точки зрения физической силы , скорости действия Є производительности труда . Ведущий принцип организации взаимодействия в системе « Человек–Машина » – ориентация на человека , как субъекта труда и творчества , с целью наиболее полного и рационального использования его интеллектуального и творческого потенциала . Т.О–М.– средство поддержания профессиональной деятельности человека : « Машина – для человека , а– не человек для машины !!! » . NB ║ Научная и практическая задача организации систем «Человек–Машина–(Среда)» состоит в рациональном распределении и согласовании функций между Человеком и Машиной при сохранении ответственности за Человека ! Эту задачу решает Инженерная психология . При этом Человек–Оператор рассматривается в первую очередь не как звено системы , а именно как живого человека , обладающего такими свойствами , как : восприятие ; внимание ; скорость реакции ; память , мышление , потребность в общении ; емкость и долговременность ; образность и гибкость оперативного мышления и т.д. В инженерной психологии рассматривают : сенсорный вход ( органы чувств , или рецепторы человека ) и моторный выход (двигательный или эффекторный аппарат человека) Человека–Оператора ; процессы переработки информации и задачи управления машинами ( объектом ) ; нормальные и критические условия жизнедеятельности Человека–Оператора ( физиологический или материальный ) . é Человек Þ индуктивное мышление Машина Þ дедуктивные действия û По этим аспектам мы рассмотрим лишь некоторые рекомендации , которые могут оказаться полезными при конструировании пультов управления , приборных панелей , конструкторско–инженерных устройств и т.п. При художественном конструировании применяются схемы взаимосвязей : простая : Человек–Объект
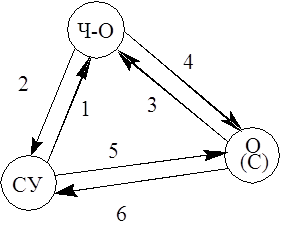
«Треугольник взаимосвязей» : Человек–Система управления–Объект ( среда ) ;
Ч–О : Оператор станка ЧПУ ; СУ : Блок ЭЧПУ ; О : Станок . 1 – получение Ч–О от СУ разнообразной выходной информации в виде сигналов от приборов ( отсчётные , световые , звуковые ) . 2 – формирование человеком сигналов управления в виде действий по настройке , регулирования , управления станком . 3 – непосредственное воздействие объекта ( среды ) на Ч–О : расположение элементов блока управления должно соответствовать психофизиологическим возможностям . 4 – воздействие человека на объект (среду) : работа со станком требует не только определённых знаний и навыков ,но и «совместимости» параметров объекта с человеком ( с учётом «помех» ) . 5 – воздействие СУ на объект ( среду ) : система ЧПУ станка может иметь определённые геометрические размеры ( что не всегда позволяет разместить её в станке ) . 6 – воздействие О(С) на СУ : СЧПУ должна нормально работать в условиях вибрации , загрязнённой атмосферы цеха , и других нежелательных воздействий . Системный подход . Чтобы упростить сложные процессы анализа работы Человека–Оператора в системах взаимосвязей применяют частотные модели поведения Человека–Оператора . Чаще всего Человек–Оператор выступает в роли «машины» по приёму и выработке информации .
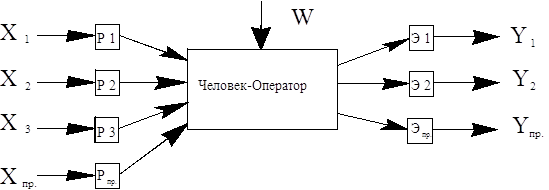
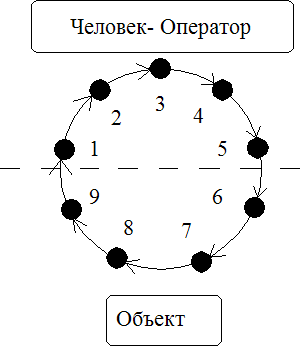
W – воздействие внешней среды . Y = F ( X , W ) .Основные рецепторы ( органы чувств ) : Р 1 – зрение ; Р 2 – слух ; Р 3 – осязание ; Рпр. – (тактильные) : обоняние ,вкус ,равновесие (вестибулярный аппарат ) . Основные эффекторы (формируют сигналы управления ) : Э 1 – пальцы рук (кисть) (точные , но менее сильные ) ; Э 2 – ноги ( менее точные , но более сильные ) ; Эпр. – звуковые команды ( речь ) , биоэлектрические потенциалы, параметры физиологической активности ( t°, потоотделение , частота пульса и др. ) В соответствии с органами чувств на деятельность человека оказывают влияние (W) : освещённость и цвет среды ; шум , атмосферное давление ; характер поверхностей , с которой имеется контакт ; наличие запахов и токсичных веществ ; рабочая поза , t°C и влажность ( термолабильность ) . Для оптимизации связи Человека–Оператора с Оборудованием необходимо знать : какое количество информации Человек– Оператор может принять , передать или переработать в единицу времени : «Пропускная» способность и предельные скорости различных реакций ; какова точность восприятия и выдачи различных сигналов : время «задержки» (обработки) сигналов ; какова надёжность работы Человека–Оператора : способность противостоять W . При этом вопросы необходимо решать путём «подгонки» параметров объекта конструирования под способности и возможности человека , а не наоборот . Т.к. приём и переработка информации – процессы познавательные (ощущение – восприятие – представление ® мышление ) , которые сформировались в течение тысячелетий эволюции человека . «Прибором» человека , с помощью которого он воспринимает или формирует сигналы , являются анализаторы : Рецептор + Нервные пути – центр в коре больших полушарий . Рецепторный аппарат тесно связан с эффекторным (двигательным ) аппаратом . Если рассмотреть Схему прохождения сигнала по контуру управления : Человек–Оператор « Объект , можно выделить 9 характерных стадий ( звеньев ) :
¬ восприятие показаний ( сигналов ) ; Á преобразование показаний индикатора в форму удобную для сравнения с программой работы ® ; ¯ принятие решения об изменении программы работы ; ° воздействие на органы управления объектом ; ± перемещение рабочих элементов регуляторов ; ² реакция объекта на воздействие ; Ç работа объекта по новой программе ; ´ отображение нового режима работы на индикаторах . Основная характеристика этого процесса – скорость обращения сигнала по контуру управления , кроме того ,– погрешностями и надёжностью звеньев ; скоростью обработки информации в них . Скорость обращения сигналов по контуру управления определяется временем полного цикла регулирования : Т = Т0 + ТМ ,где Т0 – время задержки сигнала оператором ( стадии 1...5 ) ; ТМ – время задержки сигнала объектом ( стадии 6...9 ) . ! Всегда Т0 >> ТМ . Т0 – определяется следующими компонентами : анализаторами и длительностью латентного периода ( время от момента появления сигнала среднего уровня до ответа на него действием ) : │ ?лп (за) = 0,15 .... 0,22 с │ │ ?лп (та) = 0,09 .... 0,22 с │ ?лп (общ) =0,31 ....0,39 с
Кроме того , необходимо учесть количество индикаторов и органов управления. ?з ? 10 секунд. А также темп работы оператора ( бит с ) : оптимально 0,5.....5 бит с ( < 0,5 – «засыпает» , > 5 – «перегружен»). Таким образом скорость обработки сигнала оператором зависит от : характера информации ( знакомая 30...45 бс ; незнакомая ) ; конструкции индикатора ( шкала, светофор , звук ) ; характера считывания информации (команда , осведомление , ситуация ) ; различимость сигнала (сигнал должен превышать фон в 3....5 раз). Основные требования к конструкции индикаторов .Индикаторы обеспечивают Человеку–оператору приём сигналов управления . Основной аппарат приёма – органы чувств , являющиеся частью анализаторов. При работе с объектами управления Человеке–оператор обычно использует только три вида анализаторов : зрительный (визуальный ) , слуховой (аудиальный) и осязательный (тактильный ) . Особенности этих анализаторов человека (физиологические ) представляют определённые требования к конструкции индикаторов . Зрительный анализатор , основной элемент которого – глаз , очень сложная система : 7 млн. колбочек и 130 млн. палочек . Палочки обеспечивают высокую разрешающую способность при ДО и цветовое зрение. Колбочки– сумеречное зрение и чёрно–белое зрение . Различают бино– и монокулярное зрение ( поле зрения ). Самая узкая область различения цвета – зелёная , самая широкая – жёлтая (даже дальтоники) . Некоторые характеристики глаза нелинейные , если шкала используется на расстоянии до 500 мм от глаз , то пропорционально увеличения шкала на расстоянии 5 м даст в 10 раз большую погрешность . Среднее время наведения двух глаз в одну точку – около 0,17 секунд , различение площадей двух фигур – до 2 % ; разрешающая способность по углу – 3°.... 12°, по яркости – 2 % . Эти параметры обеспечиваются при наблюдении в течении > 0,5 с. Время адаптации глаза к изменению освещённости – от 5 до 30.....40 мин. Визуальные индикаторы могут иметь вид : светофоров ; счётчиков ; шкал и светопланов . Светофоры – сигнальная лампочка , табло или светящаяся кнопка (клавиша) : наличие или отсутствие сигнала . Все цвета , кроме синего ! = Различимость .Счётчики – самые точные отчетные устройства . Но их недостаток – они не могут показывать направления и скорость изменения параметра . Темп подачи сигналов , лишняя информация : нули слева . Шкалы – по форме , подвижности . Основные требования – различимость делений и знаков. Светопланы – электронно–лучевые трубки , люми– и газоразрядные индикаторы , жидко–кристальные индикаторы (ЖКИ) и светоизлучающие диоды (СИД), выполняемые часто в виде комбинированных дисплеев . Для облегчения работы рекомендуется использовать мнемосхемы . Например , проекция на лобовое стекло в летательных аппаратов . Слуховой анализатор , основной элемент которого – ухо , воспринимает звуковые колебания простые (чистые тона ) и сложные (речь , музыка ) в широком диапазоне частот и уровней сигнала ( 20.....2000 Гц , 0,002 Нм2 ...... 100 Нм2 ) . Слух обеспечивает стереоэффект (~ 0..... 120 Дб) , биноуральный слух имеет незначительную разрешающую способность по углам , но обеспечивает приём сигналов из любой точки сферы , в центре которой Человек–оператор . Основные рекомендации по акустическим индикаторам : tзвучания сигнала ? 0,3.....0,5 с . ; если используется несколько АС угол между ними должен быть 15....20°(без поворота головы) или 3.....4° (при возможности повернуть голову на источник звука ) ; учитывать биноуральность слуха и эффекты адаптации ; наличие шума ( мешающих сигналов ) , модуляцию сигнала . Тактильный (осязательный) анализатор – даёт возможность на ощупь определять характерные формы органов управления и облегчать или ускорять процесс управления . Тактильные индикаторы – различимые на ощупь : рукоятки , кнопки , тумблеры . Для лучшей различимости – размеры должны различаться между собой ? 20 % . NB : когда органы управления рядом – но результат воздействия разный : цвет и форма ! На основании сказанного рекомендуется (общие рекомендации) : использовать зрительные анализаторы – для решения задачи само ориентации ; снятия искажений с много шкальных приборов ; сравнения быстро следующих друг за другом сигналов ; наблюдения за источником информации и получения точной количественной информации ; оценки движения . Лучшая различимость – у дискретных сигналов ; использовать слуховые анализаторы – для обеспечения индивидуальной одноканальной связи ; передачи кратких сообщений ; сигнализации о завершении ряда следующих друг за другом операций; для дублирующих сигналов. Для различимости– один уровень , но разная частота ; использовать тактильные анализаторы– для тех случаев , когда зрение или слух заняты ; когда требуются подтверждающие сигналы или когда формируются простые команды управления. Конкретно , смотреть Вудсон У. , и другие « Справочник по инженерной психологии для инженеров и художников–конструкторов . « Москва , «Мир» , 1968 год . Основные характеристики рабочей среды .Характер физической и нервно–психологической нагрузки делят на четыре категории : ¬ лёгкая (комфортная ) рабочая среда ; средняя ( относительно дискомфортная ) рабочая среда ; ® тяжёлая ( экстремальная ) рабочая среда ; ¯ очень тяжёлая (сверхэкстремальная ) рабочая среда . смотри сборник стандартов безопасности труда (ССБТ) ® «Техника безопасности и охрана труда»; «Основы безопасности жизнедеятельности» . Формирование сигналов управления – осуществляется регуляторами с применением эффекторного аппарата Человека–оператора . Можно сказать , что в этом случае возможно два режима работы : Человек–инструмент (источник сигнала ) и Человек–машина (источник энергии ) . При выборе или конструировании регуляторов необходимо соблюдать два основных правила : нельзя пренебрегать двигательными навыками человека. В противном случае затрудняется процесс управления ; для достижения максимального эффекта управления , усилия , прилагаемые человеком к регуляторам , должны соответствовать характеру действия регулятора . По конструкции все регуляторы можно разделить на : нажимные ( кнопки , клавиши , педали ). Для кнопок : чем реже используется и чем меньше прилагаемое тем меньше диаметр поверхности нажатия – вогнутая , для облегчения фиксации пальца . движковые ( ручельные ) – это устройства управления простыми переключателями , которые ( как и нажимные ) должны иметь два чётко фиксируемых крайних положения ( нежелательное исключение – трёх позиционные ) . рычажные – головки тумблеров и качающихся рычагов : должны иметь чётко различимый угол отклонения и размеры ( форму ) головки для захвата пальцами или всей рукой . вращательные – разнообразные ручки управления с плавным или дискретным движением рабочего элемента . Рукоятки управления могут быть тактильными индикаторами , что даёт возможность определять характерные формы рукояток и облегчать или ускорять процесс управления. Замечание . Большое влияние на точность и темп работы Человека– оператора оказывает степень обученности , натренированности и профессиональной пригодности ; необходимость и желание выполнять поставленную задачу . Для обеспечения универсальности обслуживания объектов операторами с различными параметрами должен соблюдаться принцип максимальной стабильности характеристик объекта. Поэтому индикаторы и органы управления группируются на панелях Панели управления (прибора) по их функциональному применению . ¬ Наиболее важные и часто используемые индикаторы и органы управления размещают в оптимальной зоне ; аварийные – в легкодоступных местах вне оптимальной зоне ; ® второстепенные , периодически используемые – вне оптимальной зоны , руководствуясь правилами группировки и взаимосвязи между ними . Последние правила состоят в следующем : 1. При групповом размещении индикаторов для контрольного считывания : ¬ при наличии в группе шести и более индикаторов – их располагают в виде двух параллельных рядов (вертикальных или горизонтальных ) ; не делать более пяти – шести разрядов ; ® при наличии 25–30 и более индикаторов комплектовать их в 2–3 зрительно различимые группы . Лицевые поверхности индикаторов следует располагать перпендикулярно к линии взора оператора , находящегося в рабочей позе . 2. При размещении органов управления : ¬ органы управления необходимо располагать в зоне досягаемости (Человек–оператор не должен менять рабочую позу , и не требуется перекрещивать руки (ноги ) или закрывать рукой при включении индикатор ). Важные и часто используемые – в зоне лёгкой досягаемости . органы управления необходимо располагать в последовательности , соответствующей последовательности действий (например, включения (выключения )) , и группироваться таким образом , чтобы действия оператора осуществлялись слева–направо и сверху– вниз . Страницы: 1, 2, 3, 4, 5, 6, 7, 8 |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, курсовые работы, реферат, доклады, рефераты, рефераты скачать, рефераты на тему, сочинения, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||

 , Н – допустимая сила натяга, отне–
, Н – допустимая сила натяга, отне–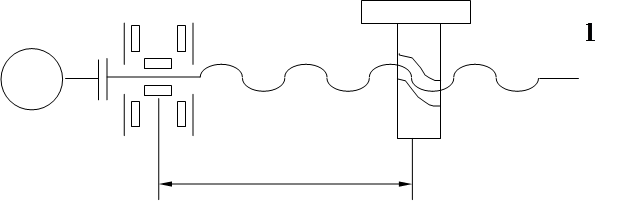
 , H/м
, где
, H/м
, где