|
Курсовая работа: Проект бурякозбирального комбайна з конструктивною розробкою вібраційного лемішного копачаВизначити оптимальну між осьову відстань а, мм. З умови довговічності ланцюга а = (30…50) р, де р – стандартний крок ланцюга. Тоді, Визначаємо число ланок в ланцюзі 1р:
Звідси
Отримане значення округлюємо до цілого lp= 86. Визначити довжину ланцюга l, мм: l = lр ∙ р; (2.23) підставивши отримаємо: l = 86 ∙ 19,5 = 688 мм. Визначаємо діаметр зірочок, мм. Діаметр ділильного кола: Ведучої зірочки веденої зірочки
Діаметр виступів ведучої зірочки
Діаметр виступів веденої зірочки
де К = 0,7 – коефіцієнт висоти зубця; К7 – коефіцієнт числа зубців. В силовій схемі ланцюгової передачі можна розрізнити F1 і F2 – відповідно ведучої і веденої вітки ланцюга, Н; F1 – колова сила, Н; F2 – сила попереднього натягу, Н; Ft – натяг від центральних сил, Н. Для ланцюгової передачі, яка працює по принципу зачеплення, а не
тертя, значення F0 не має такого значення як для ремінної
передачі (F0 складає всього декілька відсотків від Ft).
Для розповсюджених на практиці тихохідних і середньо швидкісних передач ( F1 ≈ Ft F2 ≈ 0 [12] Тоді нова сила Ft на даній зірочці визначається за формулою:
де Мкр – крутний момент на зірочці, Н·м; d – ділильний діаметр зірочки, м. Отже
звідси F1 = Ft = 241,839 H. Сила F1 діє на зірочку під кутом 2.4 Силовий розрахунок валу Крутний момент ексцентрика: М = В ∙ l max (2.25) де В – реакція ексцентрика, Н; l max – ексцентриситет, м. М = 214,7 · 0,006 = 1,29 Н∙м Потужність ланцюгової передачі:
де n – частота обертання вала.
Крутний момент ланцюгової передачі:
Консольна сила від муфти:
де Dмуфти – діаметр муфти, м.
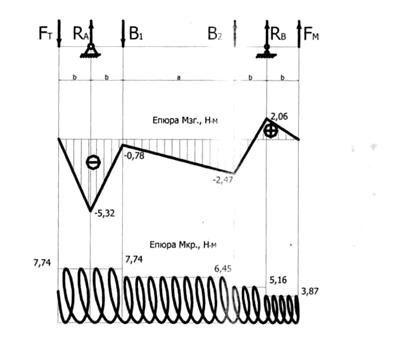
Прикладемо всі сили, які діють на вал та реакції підшипників рис. 2.1. Розкладемо всі сили на складові, які паралельні осям координат.
Рис. 2.1 Розрахункова схема вала з епюрами моментів Розрахуємо опорні реакції. Горизонтальна площина.
– Ftг · b + В1г – b – B2г ∙ (b + а) – RВг · (b + b + a) – FM ∙ (b + b + b + a) = 0 звідки
Підставимо дані у формулу (2.25) одержимо:
– FМ · b + В2г b – B1г ∙ (а + b) + RАг · (2b + a) – Ftг ∙ (3b + a) = 0. Звідки
Підставивши дані у формулу (2.26) одержимо:
Перевірка:
= – 241,84 + 448,36 + 214,7 – 214,7 – 300,31 + 93,8 = 0. Знайдемо значення згинальних моментів у характерних січеннях вала і побудуємо епюри згинальних моментів. Січення А: Мгор = – Ft · b = – 241,84 ∙ 0,022 = – 5,32 Н∙м. Січення 2: Мгор = – Ft · b = – 241,84 ∙ 2 ∙ 0,022 +448,36 ∙0,022 = – 0,78 Н∙м. Січення 3: Мгор = – Ft (2b + a) + RA(b + a) – B1 ∙ a = = – 241,84 · 0,252 + 448,36 · 0,23 – 214,7 · 0,208 = – 2, 47 Н·м. Січення В: Мгор = – Ft · (3b + a) + RA · (2b + a) – B1(a + b) + B2 · b = = – 241,84 · 0,274 + 448,36 · 0,252 · 214,7 · 0,23 + 214,7 · 0,022 = 2,06 Н·м. У вертикальній площині проекції сил на вісь X рівні 0. Отже визначимо значення згинальних моментів:
З епюр Мкр Мзг видно, що небезпечним є січення вала, що співпадає з вольницею А, де Mkp = 7,74 Н· м, Мзг = 5,32Н∙м. Розрахунковий момент визначимо за формулою:
Отже,
З умови міцності [7]
де М = Мроз W – осьовий момент опору, м3, [ Із формули (2.29) визначаємо:
підставивши отримаємо:
З іншої сторони
де d – зовнішній діаметр вала. Тоді з умови
знаходимо діаметр вала:
звідси
Розрахунковий діаметр вала визначаємо за формулою: dpoз = d · к, м (2.38) де k – коефіцієнт запасу міцності: к = 1…1,7 підставивши у формулу (2.38) отримаємо: d роз = 0,1 ∙ 1,7 = 0,017 м. Для розрахунків приймаємо d = 30 мм. Перевіряємо вал на міцність за 4 теорією міцності [7] за формулою:
де
Напруження згину розраховуємо за формулою:
де Мзг – сумарний згинальний момент в небезпечному перерізі, Н·м; d – діаметр вала в небезпечному перерізі, м. Отже за формулою (2.40.)
напруження кручення за наступною формулою:
де Мкр – крутний момент в небезпечному січенні, Мкр = 7,74 Н·м. Підставивши отримаємо:
Тоді за формулою (2.39) одержимо:
Отже, умова міцності виконується. У кріпленнях шатуна попередньо вибрані підшипники кулькові радіальні однорядні за ГОСТ 8338–75 d x D х В = 33 х 55 х 13 мм. Придатність попередньо вибраних підшипників визначається співставленням розрахункової динамічної вантажопідйомності Сгр, Н, з базовою Сг, або базової довговічності L10h, год із необхідною Lh, год по умовам: Сгр < Сг або L10h > Ph (2.42) базова динамічна вантажопідйомність підшипника Сг представляє собою постійне радіальне навантаження, яке підшипник може сприйняти при базовій довговічності, що складає 106 обертів внутрішнього кільця Сг = 15,9 кН [12]. Необхідна довговічність підшипників Lh, передбачена ГОСТом 16162–85. Lh = (8…12)∙103, год, розрахункова динамічна вантажопідйомність
де RE – еквівалентне динамічне навантаження, Н;
m – показник степені: m = 3 для кулькових підшипників. Відношення для аналізу і вибору відповідної формули для визначення еквівалентного динамічного навантаження
де Ra – осьове навантаження підшипника, Н; е – коефіцієнт осьового навантаження, приймаємо е = 0,244; v – коефіцієнт обертання, приймаємо v = l – при обертанні внутрішнього кільця підшипника; Rr – радіальне навантаження підшипника, Н, Rr = R – сумарна реакція підшипників. Осьової сили, що діє на підшипник не буде. Це пояснюється тим, що при захопленні коренеплоду на копачі діють однакові бічні сили. Для вибору підшипника припустимо, що при встановленні валу відбудеться його деякий перекіс або в результаті удару відбулося скривлення валу. Так, як вибраний клас підшипників дозволяє вузлу функціонувати при переносі осі внутрішнього кільця до 3°, то на підшипниках можливе осьове навантаження рівне:
де n – кількість лемешів, n = 6; Fв – навантаження вала у вертикальній площині, Н, Fв = 0; Fг – навантаження вала у горизонтальній площині, Н, Fг = 93,8 H; Н – коефіцієнт можливих осьових навантажень в роботі, Підставивши значення у формулу (2.45) отримаємо:
Сумарна реакція підшипників R, Н:
підставивши значення у формулу (2.40) одержимо:
звідси випливає, що еквівалентне динамічне навантаження розраховується за формулою: RЕ = VRr K6 KT, H (2.47) де Кб – коефіцієнт безпеки, Kб = 1,1 [12] KТ – температурний коефіцієнт, КТ = 1,1 [12]. Отже RE = 1· 419 · 1,1 · 1 = 460,9 H підставивши значення у формулу (2.43) розрахуємо динамічну вантажопідйомність:
Базова динамічна вантажопідйомність підшипника Cr = 15900 H, отже умова придатності виконується, оскільки: Сr = 15900 > Сгр = 958,57 Н Розрахункова базова довговічність:
отже,
необхідна довговічність Lh = 10 ∙ 103 = 104 год. Отже, Lh = 45643015 > 10000 год. Так як умова Crp < Cr, і L10h > Ц, то попередньо вибрані підшипники придатні для конструювання вузла. 2.5 Визначення потужності на привід викопувального органа Потужність, яка затрачається на привід копача розраховується за формулою: N заг = N вібр + N тяг.опір (2.49) де Nвiб – потужність на вібрацію копача, Вт;
де Nл.п – потужність на здійснення ланцюгової передачі, Вт;
Отже
Nтяг.oпір – потужність, що затрачається на пересування копача в ґрунті, Вт, обчислюється за формулою: Nтяг.oпір = Nтяг.зв · q. (2.51) де Nтяг.oпір – потужність, що затрачається на пересування звичайного лемеша в ґрунті, Nтяг.зв = 14 кВт [10] q – коефіцієнт зменшення тягового опору q = 0,71. Підставивши, отримаємо Nтяг.oпір = 1400 ∙ 0,71 = 9946,98 Вт Nзаг = 2053,02 + 9946,98 = 12000 Вт =12кВт. 3. Обґрунтування побудови схеми машини 3.1 Обґрунтування функціональної схеми Водій направляє передні колеса 1 (лист 2 графічної частини), а відповідно, і лемешеві копачі 2 захвачують і видаляють корені з ґрунту. Лопатеві бітери 3 передають корені на шнековий очисник. Шнеки 4 і вальці 5 очисника видаляють із вороху ґрунт, рослинні домішки і одночасно транспортують корені до поздовжнього елеватора 6. Елеватором корені передаються на горизонтальний стрічковий транспортер 7, розміщений на бункері. Потім корені поступають на перший вал грудкоподрібнювача 9, кулачки якого руйнують залишкові грудки ґрунту і видаляють їх з вороху. Далі корені вивантажувальним елеватором 8 подаються в кузов транспортного засобу, який рухається поряд. Коли у воросі немає міцних ґрунтових грудок, то напрямок руху стрічки транспортера 7 можна змінити на зворотній; корені при цьому відразу ж будуть направлятись на вивантажувальний елеватор, минаючи грудкоподрібнювач. 3.2 Обґрунтування принципової схеми Коренезбиральна машина складається з самохідного шасі і навішеного коренезабірника (лист 4 графічної частини). Шасі в свою чергу складається з рами, яка спирається на мости ведучих і ведених коліс, силового агрегату, варіатора площадки водія з кабіною, а також електричної і гідравлічної систем. Коробка передач в поєднанні з варіатором приводу ходової частини забезпечує безступінчату зміну швидкості. Частина вузлів коренезабірника змонтована безпосередньо на рамі грудкоподрібнювач, бункер і поздовжній елеватор), друга частина (копачі, шнековий очисник) – на окремій рамі, приєднаній на несучій рамі шасі. В робочому положенні, коли копачі заглиблені в ґрунт рама опирається на міст ведучих коліс, а в транспортному – утримується гідроциліндром. Машина обладнана автоматичною системою, яка контролює роботу основних вузлів, а також автоматом водіння. Машина оснащена зовнішніми освітлювальними пристроями для роботи в нічний час \ русі по дорогам. 3.3 Обґрунтування кінематичної схеми Крутний момент передається від двигуна СМД – 64 потужністю 110 кВт через клинопасову передачу на вал з частотою обертання 945 об/хв, на якому знаходиться ведуча зірочка Оо 200 мм, закріплена за допомогою шпонкового з'єднання і кріпильного болта. Ведуча зірочка через ланцюг ГТР–8–460 з кроком р = 8 мм передає на ведену зірочку Ø210 мм крутний момент навал з частотою обертання 900 об./хв, на якому містяться ексцентрики. За допомогою ексцентрикового механізму закріпленого шпонкою, приводиться в рух шатун, що примушує копач здійснювати коливальні рухи. На одному валі ексцентрики розвернуті на 180° один відносно одного. Це забезпечує коливання копачів в протифазі. Три пари валів з'єднуються пів муфтами 125–30–2-УЗ ГОСТ 20284–82. З центрального розподільчого редуктора через ланцюгову передачу крутний момент передається на шнековий очисник, частота обертання якого 500 об./хв. і на елеватор. 4. Розробка конструкції збірних одиниць і деталей У відповідності з проектованими рішеннями розробляємо конструкцію складальних одиниць і деталей Заключним етапом створення графічної частини дипломного проекту, а також завершення роботи конструктора над виконанням вимог технічного завдання є розробка робочих креслень конструкцій складальних одиниць і деталей. Всі складальні одиниці і деталі встановлюються на окремій рамі комбайна. Викопуючий пристрій призначений для викопування коренеплодів і подачі їх на шнековий очисник, складається з двох частин: передньою частиною леміш розрихлює ґрунт, а задня частина захоплює коренеплід і витягує його. Коренезабірний пристрій складається з двох лемешів до яких приварюються кронштейни та кріплення, двох шатунів, ексцентриків, трьох валів, на яких встановлені, шість підшипникових вузлів, дві півмуфти і кріпиться ведена зірочка, яка приводить в рух коренезабірний пристрій. Привід коренезабірного пристрою здійснюється за допомогою ланцюга ПР-8–460 з кроком р = 19,5, діаметр ролика для якого d = 2,31 мм. Число зубців ведучої зірочки приводу коренезабірного пристрою Zl=25; діаметр ділильного кола dDi=64 mm; діаметр кола виступів Del=68,21 mm; діаметр кола впадин Dn=63,09 mm. Зірочка посаджена на валу за допомогою шпонки h-b=12–8 ГОСТ 23360–78. Число зубців веденої зірочки приводу коренезабірного пристрою Z2=27; діаметр кола впадин D і2=67,04 мм; діаметр кола виступів De2=73,33 мм; діаметр ділильного кола dd2=68,9 мм. Зірочка посаджена на валу за допомогою шпонки h · b = 10–8 ГОСТ 23360–78. Ведуча і ведена зірочки розміщені на постійній відстані одна від одної. Півмуфта посаджена також на шпонку h · b = 10–8 ГОСТ 23360–78 і фіксується гвинтом АМ6–8 ГОСТ 17475–80. Вал, як складальна одиниця кріпиться до рами за допомогою двох підшипникових вузлів. Діаметр вала під підшипник Ø30 кб. Вал виготовляється із сталі 45 ГОСТ 1050–74. Підшипниковий вузол складається із кулькового радіального однорядного підшипника d x D х В = 30 х 55 х 13 ГОСТ 8338–75. підшипник знаходиться у корпусі, який виливається з чавуну С415 ГОСТ 1412–79. Корпус підшипника з'єднується за допомогою різьбового з'єднання. На вал напресовується ексцентрик з підшипником. Внутрішнє кільце підшипника фіксує прижимна втулка, яка одягається на вал. На підшипник одягається шатун, після чого з обох боків фіксується кришками і шплінтами. Зовнішнє кільце підшипника фіксується також кришкою. З обох сторін вала є отвори для гвинтів, які фіксують положення з одного боку муфти з другого – зірочки. На валу просвердлено два отвори о8 мм для шплінтів, які фіксують положення шатуна. Є три пари валів, які з'єднуються між собою півмуфтами. До лемеша приварене кріплення до якого за допомогою пальця кріпиться шатун з впресованим підшипником dхDxB = 45x75xl6. ГОСТ 8338–75. Для регулювання ширини міжрядь на пальці з обох боків є три регулювальні пластини. їх можна переміщувати з одного боку в інший. Завдяки шатунам лемеші набувають коливальних рухів. В передній частині лемеша приварене кріплення, через яке проходить вал, який кріпиться до рами. На валу з обох боків містяться чотири регулювальні пластини для регулювання ширини міжряддя. Лемеші виготовляються з листової сталі Ст. 45. Передня частина лемешів заточується під кутом 18°. 5. Організація робіт з застосуванням розроблюваної техніки 5.1 Експлуатація розроблюваної машини Експлуатація бурякозбирального комбайна – це процес, що включає в себе використання машини по своєму призначенню, підтримання її робото здатності (технічне обслуговування) і забезпечення її функціонування (підготовка до використання і технічного обслуговування, технічне обслуговування, зберігання транспортування та ін.). Для зниження затрат ручної праці, збільшення продуктивності, і скорочення термінів збирання цукрових буряків розробимо технологічну схему збирання цукрових буряків. Проектована машина працює в комплексі з гичкозбиральною машиною БМ-6А, навантажувачем СПС – 4,2 та транспортними засобами для відвезення основного і допоміжного урожаю. Гичкозбиральна машина зрізує гичку і завантажує в транспортні засоби, які відвозять їх до місць силосування. Після цього бурякозбиральний комбайн викопує корені і завантажує в транспортні засоби, які відвозять їх на край поля у бурти або прямо на цукровий завод в залежності від кількості транспортних засобів і чистоти коренів. Корені, вивезені на край поля, завантажуються у транспортні засоби за допомогою навантажувача СПС – 4,2 і відвозяться на цукровий завод. В комплекс робіт по підготовці розробленого бурякозбирального комбайна до експлуатації входять: 1. дозбирання; 2. монтаж допоміжних агрегатів; 3. регулювання робочих органів; 4. заправка, Дозбирання комбайна проводити в такій послідовності: 1. встановити перила, драбини, провести монтаж енергетичного засобу на раму комбайна; 2. провести монтаж вивантажувального пристрою; 3. встановити демонтовані клинові паси; 4. провести монтаж електрообладнання (фар, підфарників, фонарів, звукового сигналу, акумуляторної батареї) дзеркал заднього виду; 5. встановити термос, аптечку і проти пожежні засоби (вогнегасник, лопати); 6. відновити пошкоджені при транспортуванні, завантажувально-розвантажувальних роботах або до збиральні лакові і фарбовані покриття. Технологічні регулювання робочих органів здійснюються з ціллю попереднього налагодження комбайна на збирання певних видів культур і при певних умовах. Регулювання основних робочих органів здійснюється з кабіни за допомогою відповідних рукояток і важелів. |
|
|||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, курсовые работы, реферат, доклады, рефераты, рефераты скачать, рефераты на тему, сочинения, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||

 – міжосьова
відстань в кроках.
– міжосьова
відстань в кроках. ; (2.22)
; (2.22) .
. /
/ /
/ .
. ,
,
 (2.29)
(2.29)
 .
.
 (2.34)
(2.34) (2.37)
(2.37) .
.
 (2.41)
(2.41)
 (2.43)
(2.43) (2.44)
(2.44)
 , год (2.48)
, год (2.48) год
год , кВт (2.50)
, кВт (2.50) Вт
Вт
