|
Курсовая работа: Разработка системы автоматического управления положением объекта
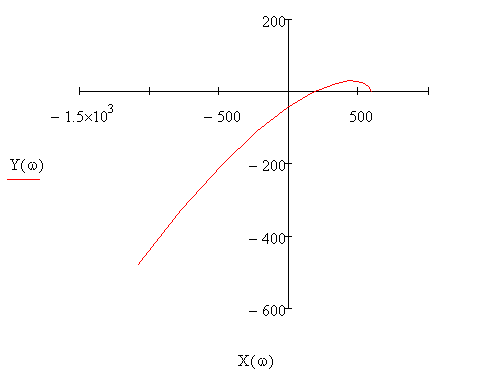
Рисунок 19 Для устойчивости замкнутой системы необходимо и достаточно, чтобы годограф вектора N(jщ), начинаясь при щ=0 на вещественной оси, с ростом частоты от нуля до бесконечности обходил последовательно против часовой стрелки n квадрантов комплексной плоскости, где n – порядок характеристического уравнения замкнутой системы. Из графика видно, что система неустойчива, так как не нарушен порядок обхождения годографом квадрантов комплексной плоскости. 2.2 Построение желаемой ЛАХ следящей системы при ступенчатом управляющем воздействии При отработке ступенчатого управляющего воздействия g0
длительность переходного процесса и перерегулирования не должны превышать максимально
допустимых значений Построение желаемой ЛАХ иллюстрируется рисунком 20 и выполняется в такой последовательности: 1. Строится низкочастотный участок ЛАХ. Через точку с координатами
2. Выбирается частота среза желаемой ЛАХ, если система может обеспечить
изменение регулируемой величины с максимальным ускорением
где Тогда оптимальное значение частоты среза вычисляется по формуле:
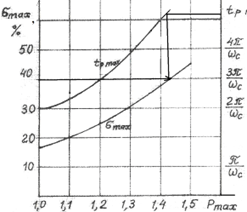
По заданному значению перерегулирования
Рисунок 21 Из графика видно, что m=5,2. Найдя коэффициент m, можно определить значение минимальной частоты среза
выбранная частота среза должна удовлетворять условию:
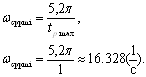
данному условию удовлетворяет частота С помощью номограммы, изображенной на рисунке 22, по заданному
значению величины перерегулирования
Рисунок 22 Запасы устойчивости по модулю 3. Средне частотная часть желаемой ЛАХ сопрягается с низкочастотной.
Сопряжение производится таким образом, чтобы наклон желаемой ЛАХ по возможности
не отличался от наклона соответствующих участков нескорректированной системы.
Желаемая ЛАХ в низкочастотной зоне пересекает ЛАХ нескорректированной системы в
точке с абсциссой 4. Строится высокочастотный участок ЛАХ. Для получения более простой схемы коррекции эту зону мы должны были бы провести в виде прямой с наклоном -60 дБ/дек. Но в результате этого при построении фазовой характеристики можно заметить, что система является неустойчивой. Поэтому эту зону проведем в виде прямой с наклоном -40 дБ/дек. 5. После построения желаемой ЛАХ определяют соответствующую ей
фазовую характеристику и проверяют, выполняется ли в диапазоне частот
Условие выполняется. При невыполнении данного условия следует расширить среднечастотную зону желаемой ЛАХ, т.е. увеличить ординаты Lз и – Lз в зависимости от того, что окажется более эффективным. Построенная ЛАХ описывается формулой:
а ей соответствует фазо-частотная характеристика:
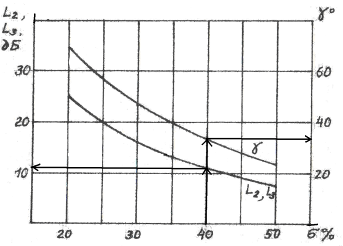
где 2.3 Определение ЛАХ и выбор схемы корректирующего устройства следящей системы Расчет корректирующего устройства начнем с выбора вида коррекции. В данном случае выбираем для следящей системы параллельную коррекцию или местную отрицательную обратную связь, которая по сравнению с последовательной обладает целым рядом преимуществ, хотя, как правило, требуются дорогостоящие тахогенераторы. 2.3.1 Выбор охваченных элементов Одна из самых важных задач – определение места включения коррекции в систему. Обычно обратной связью охватываются элементы системы, оказывающие наибольшее влияние на ее быстродействие. Исходя из этого, охватим обратной связью исполнительный двигатель и усилитель мощности. Эти элементы расположены вблизи от выхода системы, где сигнал имеет достаточную мощность. На выходе системы высокочастотные помехи значительно ослаблены, что значительно облегчает работу дифференцирующих контуров в схеме коррекции. Структурная схема системы, с параллельной коррекцией представлена на рисунке 23.
Рисунок 23 Передаточная функция охваченных элементов:
где В этом случае передаточная функция неохваченных элементов равна их коэффициенту передачи:
Коэффициент усиления усилителя:
Т.к. 2.3.2 Построение ЛАХ обратной связи Находим ЛАХ обратной связи:
где
Выражение в
квадратных скобках есть ЛАХ внутреннего замкнутого контура По виду ЛАХ а) на
частотах Поскольку
входной величиной обратной связи является угол поворота электродвигателя, в
качестве такого элемента выбираем тахогенератор с передаточной функцией
б) на
частотах Тогда общую передаточную функцию обратной связи можно записать в виде:
Характеристики L(щ) и ц(щ) представлены на рисунке 20. 2.3.3 Определение коэффициента передачи обратной связи По построенной
характеристике Lос(
С другой стороны этот коэффициент определяется выражением (12):
Мы получили, что требуемый коэффициент усиления Кос оказался больше реального (0,1¹0,014). По этому в цепь коррекции необходимо дополнительно ввести усилитель. Коэффициент
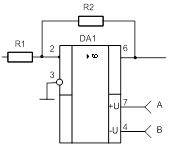
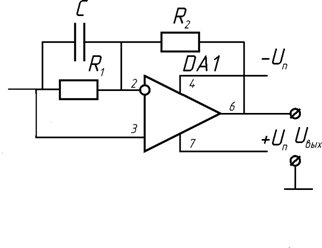
усиления Схема усилителя показана на рисунке 24.
Рисунок 24
Теперь 0,1=0,573×0,025×7.14 0,1=0,1 По справочнику /2/ подбираем резисторы: Таблица 24
В качестве ОУ DA возьмем микросхему К140УД7 2.3.4 Выбор элементов параллельной коррекции Первым элементом является тахогенератор. При его выборе должны быть выполнены требования: – линейность
функции преобразования – малые значения статического момента трения и момента инерции по сравнению с аналогичными параметрами двигателя; – максимальные частоты вращения двигателя и тахогенератора должны быть соизмеримы. Этим
требованиям удовлетворяет тахогенератор постоянного тока ТГП-60 с коэффициентом
передачи Таблица 25
Преимуществом этой машины является возбуждение от постоянных магнитов, ввиду чего ей не требуется источник питания. Вторым
элементом является форсирующее звено с передаточной функцией Общая передаточная функция корректирующего устройства:
где
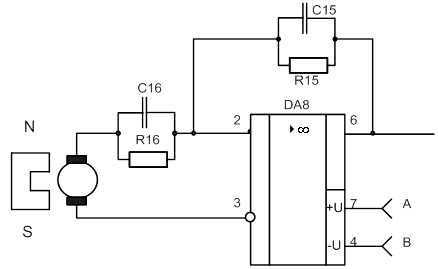
Схема параллельной коррекции изображена на рисунке 25.
Рисунок 25 При выборе номинальных значений сопротивлений и емкостей одним значением (обычно емкости) в каждом каскаде необходимо задаться, остальные определяются из соотношений
Пусть В качестве элементной базы используется: – микросхема К140УД7, параметры которой приведены в таблице 26. Таблица 26
– резисторы С2–33Н – 0,125, параметры которых приведены в таблице 27. Таблица 27
– конденсаторы К10–54, параметры которых приведены в таблице 28. Таблица 28
Рисунок 26 Для получения необходимого среза в -60 Дб в низкочастотной зоне ставится фильтр первого порядка последовательно с активным фильтром и тахогенератором. Общая передаточная функция цепи обратной связи тогда будет иметь вид:
Усилитель, на котором собран этот фильтр, является так же усилителем и активного фильтра, его данные приведены в таблице 26. При выборе возьмем сопротивление резисторов одинаковым и рассчитаем только емкость конденсатора.
где Пусть – резисторы С2–33Н – 0,125, параметры которых приведены в таблице 29 Таблица 29
– конденсатор К10–54, параметры которого приведены в таблице 30 Таблица 30
Список использованных источников 1. Выгода Ю.А., Малёв Б.А., Мясникова Н.В. «Расчёт систем управления. Линейные непрерывные системы», Пенза 2002 г. 2. Электронные устройства систем автоматики. Обучающая система по дисциплине «Электроника» 3. Гутников В.С. «Интегральная электроника в измерительных устройствах», Ленинград «Энергоатомиздат», 1988 г. 4. Полупроводниковые приборы: транзисторы. Справочник под редакцией Горюнова, Москва «Энергоатомиздат», 1985 г. 5. Справочник по полупроводниковым диодам, транзисторам и интегральным схемам под редакцией Горюнова М.Н., Москва «Энергия», 1977 г. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||
| НОВОСТИ |  |
|
|
||
| ВХОД | |
|
|
|||||
Рефераты бесплатно, реферат бесплатно, курсовые работы, реферат, доклады, рефераты, рефераты скачать, рефераты на тему, сочинения, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||

 ,
, ,
,