|
Курсовая работа: Разработка системы автоматического управления положением объектаКурсовая работа: Разработка системы автоматического управления положением объектаКУРСОВАЯ РАБОТА "Разработка системы автоматического управления положением объекта"Пенза, 2010 Введение Автоматическое управление различными техническими объектами является одним из самых прогрессивных направлений в развитии техники. При автоматическом регулировании задача поддержания постоянства регулируемой величины или изменения её по какому-либо закону должна выполняться без непосредственного участия человека. Устройство, освобождающее человека от выполнения функций регулирования, называемое регулятором в совокупности с объектом управления называется системой автоматического управления (САУ). Все САУ по принципу действия можно разделить на 3 группы: разомкнутые системы (регулирующее воздействие определяется лишь информацией о цели управления, которая заключена в задающем воздействии), САУ, действующие по принципу регулирования по отклонению (регулирующее воздействие определяется не только информацией о цели управления, заключенной в задающем воздействии, но и на основе информации о результатах регулирования), системы, сочетающие принцип регулирования по отклонению и по возмущению (регулирующее воздействие определяется информацией о цели управления, заключенной в задающем воздействии, действительным значением регулируемой величины и информацией о возмущающем воздействии). САУ, действующие по принципу регулирования по отклонению, являются в настоящее время самым распространённым классом автоматических систем. Такие системы находят широкое применение для автоматического регулирования различных физических величин в объектах, относящихся к различным отраслям техники (регулирование напряжения и частоты источников питания, давления и температуры в герметичной камере, курса и высоты полёта самолёта). В данной работе разрабатывается следящая система, которая также действует по принципу регулирования по отклонению, что существенно повышает точность ее регулирования. Разработка системы будет проходит в несколько этапов: – первая часть курсового проекта будет посвящена выбору и расчету основных элементов нестабилизированной системы, – вторая часть анализу устойчивости системы и синтезу корректирующего устройства, обеспечивающего требуемые качественные показатели, – последняя часть разработке и описанию схемы электрической принципиальной. нестабилизированный система управление корректирующий 1. Статический расчет системы 1.1 Составление функциональной схемы системы Из данных
технического задания видно, что объект управления вращается с угловой скоростью
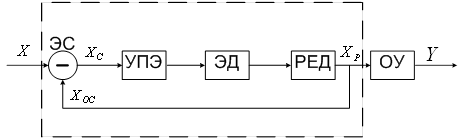
Электродвигатель будет передавать вращающий момент к объекту управления через редуктор. Для определения сигнала рассогласования необходимо включить в схему элемент сравнения, а для усиления сигнала рассогласования до величины, обеспечивающей нормальную работу электродвигателя, необходимо включить в схему усилительно-преобразовательный элемент. Таким образом, предварительная функциональная схема следящей системы может быть представлена, как показано на рисунке 1.
Рисунок 1 ЭС – элемент сравнения; УПЭ – усилительно-преобразовательный элемент; ЭД – электродвигатель; РЕД – понижающий редуктор; ОУ – объект управления; X – задающее (управляющее) воздействие; XОС – сигнал обратной связи; XС – сигнал рассогласования; XР – регулирующее воздействие; Область, обведенная пунктиром на рисунке 1 – является управляющей частью системы (регулятором); Y – регулируемая величина. 1.2 Выбор основных элементов системы 1.2.1 Выбор исполнительного электродвигателя В большинстве автоматических систем управление потоками сырья и энергии осуществляется с помощью регулирующих органов, приводимых в движение электродвигателями постоянного и переменного тока. Выбор электродвигателя определяется мощностью, необходимой для перемещения регулирующего органа или объекта управления, а также перечнем разрешенных источников питания. В общем случае механическая нагрузка на оси
регулирующего органа (оси нагрузки) характеризуется моментом трения
где По справочным данным, помещенным в /1/, выбираем двигатель постоянного тока с параллельным возбуждением СЛ-521 мощностью 77 Вт, технические данные которого приведены в таблице 1. Таблица 1
Так как двигатель маломощный, то момент инерции двигателя совместно с редуктором возьмем равным
Пусковой ток якоря связан с его номинальным током соотношением
Приняв
Добавочное сопротивление в цепи якоря определяется следующим образом
Передаточное число редуктора определим по формуле
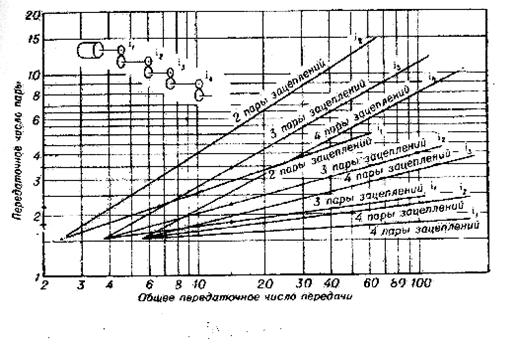
Выберем число пар зацеплений редуктора. Так как
Рисунок 2
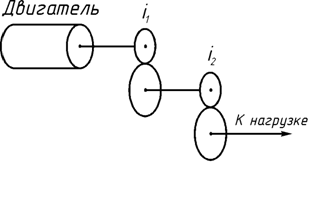
Схема редуктора представлена на рисунке 3:
Рисунок 3 Подсчитаем коэффициенты где
Конструктивная постоянная
Коэффициент
Номинальный момент двигателя
Пусковой момент двигателя
Для проверки двигателя по вращающему моменту
определим
Так как Проверка двигателя по максимальной частоте вращения дает
где
где Так как Проверка двигателя на способность развивать ускорение дает
где Так как Определим параметры двигателя, необходимые для составления его передаточной функции. Коэффициент передачи:
Коэффициент внутреннего демпфирования:
Электромеханическая постоянная времени с учетом нагрузки:
Электромагнитная постоянная времени:
Передаточная функция двигателя будет иметь вид:
Для удобства построения логарифмических характеристик это выражение следует привести к виду:
где
1.2.2 Выбор элемента сравнения В следящих системах, предназначенных для
отработки угла поворота, в качестве элементов сравнения часто применяются схемы
на сельсинах и вращающихся трансформаторах. Элемент сравнения осуществляет
сравнение заданного значения регулируемой величины с действительным значением.
Помимо выделения сигнала рассогласования сравнивающий элемент выполняет функции
преобразования входных сигналов к виду, удобному для дальнейшего применения в
системе. Основным критерием при выборе элемента сравнения является его
максимальная статическая погрешность. Общая погрешность элемента сравнения не
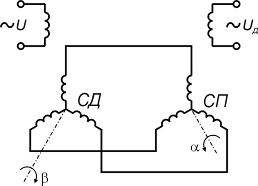
должна превышать 0,3…0,5 от Т.к. заданная ошибка достаточно велика, то в качестве элементов сравнения были выбраны сельсины. Датчик рассогласования выполнен в виде одноканальной схемы на сельсинах, работающих в трансформаторном режиме. Схема элемента сравнения представлена на рисунке 4.
Рисунок 4 СД – сельсин-датчик, СП – сельсин-приёмник. Ошибка покоя Частота вращения вала:
По частоте вращения вала и по ошибке следования выбираем сельсины СС-405ТВ, технические данные которых приведены в таблице 2. Выбираем первый класс точности. Таблица 2
Общая погрешность элемента сравнения При малых углах рассогласования коэффициент преобразования схемы на сельсинах приблизительно равен максимальному напряжению синхронизации:
1.2.3 Определение коэффициента передачи разомкнутой системы При расчете следящей системы методом эквивалентного синусоидального режима коэффициент передачи разомкнутой системы определяется из условия обеспечения заданных среднеквадратичных значений погрешности следования и погрешности покоя. Коэффициент передачи разомкнутой системы связан с коэффициентами передачи отдельных устройств соотношением:
где Погрешность
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, курсовые работы, реферат, доклады, рефераты, рефераты скачать, рефераты на тему, сочинения, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||