|
Дипломная работа: Основи базування деталей та заготовокДипломная работа: Основи базування деталей та заготовокОснови базування деталей та заготовок 1. Поняття про базу та базування У процесі виготовлення машини виникають задачі з’єднання з необхідною точністю двох або більшої кількості деталей. Такі задачі виникають також при складанні регулюванні машин та їх механізмів, при обробці деталей на різних технологічних системах, коли деталь необхідно встановити і закріпити із заданою точністю на столі верстата або в пристрої. Аналогічні задачі доводиться розв’язувати при встановленні та закріпленні різального інструменту на шпинделі верстата, борштанзі, різцетримачі, а також щоразу, коли необхідно виконати вимірювання деталі або заготовки за допомогою будь-якого вимірювального інструменту або пристрою. Для розв’язування задач такого виду служать основи базування. За державним стандартом база – це поверхня або сполучення поверхонь, вісь, точка, які належать заготовці або виробу і використовуються для базування.
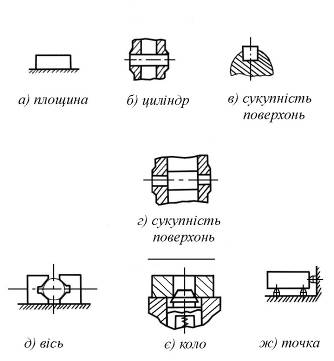
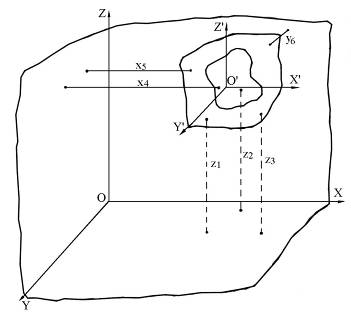
Рис. 1. Види баз Базування – це надання заготовці або виробу потрібного положення відносно вибраної системи координат: при складанні – надання деталі потрібного положення у виробі відносно інших, раніше встановлених деталей або виробів; при механічній обробці – надання заготовці потрібного положення на верстаті відносно його елементів, що визначають траєкторію відносного руху деталі та оброблювального інструменту; при вимірюванні – надання заготовці або деталі потрібного положення відносно вимірювального інструменту. Базами можуть бути: площина (рис. 1, а), циліндр (рис. 1, б), сукупність поверхонь (рис. 1, в, г), лінія: вісь (рис. 1, д), коло (рис. 1, е), точка (точки) (рис. 1, ж). 2. Основні положення теорії базування [1] В основу теорії покладений розділ теоретичної механіки про визначення положення твердого тіла в просторі. Як відомо, теоретична механіка розглядає два стани тіла: спокою та руху. Ці поняття мають сенс лише тоді, коли вказується система відліку. Якщо положення тіла відносно системи відліку протягом часу не змінюється – тіло перебуває в стані спокою, якщо змінюється – в стані руху. Потрібні положення або рух тіла відносно системи розрахунку досягається накладанням на нього геометричних або кінематичних зв’язків. Зв’язками називають умови, які накладаються або на положення, або на швидкості точок тіла. В першому випадку зв’язки називають геометричними (голономними), в другому – кінематичними (неголономними). Якщо на тіло накладені геометричні зв’язки, то завдяки їм деякі переміщення тіла виявляються неможливими. Можливим переміщенням тіла називаються елементарні переміщення, які можна здійснити без порушення накладених на тіло зв’язків. Кількість таких можливих переміщень називають числом ступенів вільності даного тіла. Якщо тверде тіло може одержувати будь-яке переміщення в просторі, то таке тіло називають вільним. Таке тіло має шість ступенів вільності: три переміщення вздовж координатних осей і три – повороту навколо цих осей. Таким чином, щоб зробити тіло нерухомим, потрібно позбавити тіло шести ступенів вільності, а для цього накласти на нього шість зв’язків. Виберемо за систему відліку прямокутну систему координат OXYZ. В цій системі розташуємо абсолютно тверде тіло, з яким жорстко зв’язана система координат O'X'Y'Z' (рис. 2). Тому зв’язки можна накладати на цю систему. Визначити положення рухомої системи координат O'X'Y'Z' відносно системи ОХУZ можна двома способами: 1) задати положення початку координат O' відносно O радіусом-вектором r і трьома кутами Ейлера (прецесії –ψ, мутації – θ і власного обертання – φ). Тоді умови перебування тіла в стані спокою будуть наступні: r = const; ψ = const; θ = const; φ = const. 2) накласти геометричні зв’язки на координатні площини системи O'X'Y'Z' Тим самим тіло позбавляється трьох переміщень вздовж осей декартової системи координат і трьох поворотів навколо цих осей, тобто тіло стає нерухомим у системі (див. рис. 2). Умови перебування тіла в стані спокою в цьому випадку матимуть вигляд: z1 = const; z2 = const; z3 = const; x4 = const; x5 = const; y6 = const.
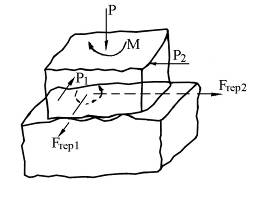
Рис. 2. Зв’язки твердого тіла Таким чином, зв’язками забезпечується задане положення тіла в системі ОХУZ у кожний розглядуваний момент часу. За реальних умов зв’язки практично здійснюються за допомогою матеріальних тіл. Реалізація двосторонніх геометричних зв’язків досягається стиканням поверхонь тіла з поверхнями іншого тіла, до якого воно приєднується, і прикладанням сил і пар сил для забезпечення контакту між ними. Реальні тіла-деталі обмежені криволінійними поверхнями, тому можуть контактувати лише на окремих елементарних площадках, які умовно вважаються точками контакту (рис. 3).
Рис. 3. Контакт двох твердих тіл Для того щоб реальні зв’язки відповідали теоретичним (жорсткий двосторонній зв’язок), для фіксації досягнутого положення необхідне прикладання сил і пар сил – силового замикання. Таким чином, матеріалізація геометричних зв’язків досягається за допомогою шести точок, розташованих відповідним чином на поверхнях деталі і силового замикання. Працюючи з кресленнями, маємо справу з ідеалізацією форми поверхонь, тому вважається, що здійснення необхідних зв’язків досягається контактом деталей по поверхнях, а наявність реальних зв’язків символізується опорними точками, які мають теоретичний характер. Схема розміщення опорних точок на базах заготовки або виробу називається теоретичною схемою базування. На теоретичній схемі базування опорні точки зображають умовними знаками (рис. ). Опорні точки нумеруються, починаючи з бази, на якій розташовується їх найбільша кількість. Номер точки проставляється справа від умовного знака. Якщо в якій-небудь проекції опорна точка накладається на іншу, то зображається одна точка і біля неї проставляються номери суміщених точок.
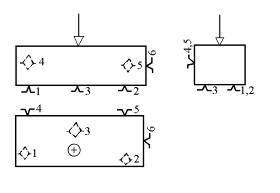
Рис.4. Умовні позначення опорних точок (а) та зусиль (б) Приклад застосування умовних позначень опорних точок і прикладених зусиль відносно до деталі призматичної форми наведено на рис. 5.
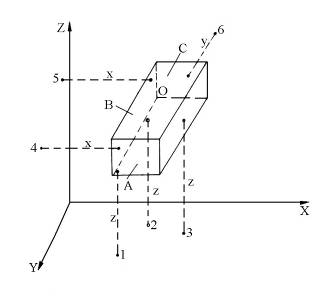
Рис. 5. Теоретична схема базування призматичного тіла 3. Базування тіл різної форми 3.1 Базування призматичного тіла Відповідно до висновків теоретичної механіки, для визначення положення призматичного тіла відносно системи координат ОХУZ необхідно зв’язати його нижню поверхню А трьома жорсткими двосторонніми утримуючими зв’язками з площиною ХОУ прямокутної системи координат (рис. 6).
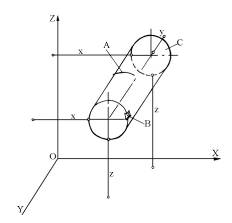
Рис. 6. Базування призматичного тіла Зв’язки z позбавляють тіло переміщення вздовж координатної осі OZ, обертання навколо осей OY та OX. Поверхня А, яка несе на собі 3 опорні точки і позбавляє тіло 3 ступенів вільності (переміщення вздовж однієї з координатних осей і обертання навколо двох інших координатних осей), називається установчою базою. Розташування опорних точок визначається з умови рівноваги тіла під дією сил тяжіння. Для того щоб виключити переміщення тіла вздовж осі OХ і обертання навколо осі OZ, зв’яжемо поверхню В відповідно двома зв’язками x4, x5 з площиною ZОY. Поверхня В, яка позбавляє тіло (заготовку) двох ступенів вільності (переміщення вздовж однієї координатної осі і обертання навколо іншої осі), називається напрямною базою. Таким чином, тіло має можливість тільки переміщуватись вздовж осі OY. Для виключення і цього переміщення зв’яжемо поверхню С одним жорстоким двостороннім зв’язком з площиною ZOХ. Поверхня С, яка несе на собі одну опорну точку і позбавляє тіло 1 ступеня вільності (переміщення вздовж однієї з координатних осей), називається опорною базою. Сукупність трьох баз, що утворює систему координат заготовки (виробу), складає комплект баз. Реалізація розглянутої теоретичної схеми базування здійснюється встановленням заготовки на установчі елементи пристрою. Невідривний контакт баз із установчими елементами пристрою забезпечується прикладанням сил затискання. 3.2 Базування циліндричного тіла Зв’язавши циліндричну поверхню А (рис. 7) двома жорсткими двосторонніми зв’язками з площиною XOY і двома – з площиною YOZ, циліндричне тіло позбавляється 4 ступенів вільності, зв’язки Z позбавляють тіло переміщення вздовж осі OZ і обертання навколо осі ОХ, зв’язки Х – переміщення вздовж осі ОХ і обертання навколо осі OZ.
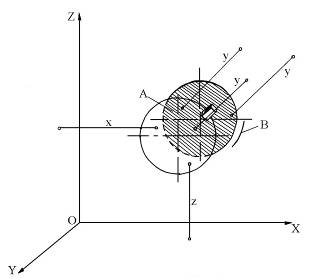
Рис. 7. Базування циліндричного тіла (довгого) Поверхня А, яка несе на собі чотири опорні точки і позбавляє тіло чотирьох ступенів вільності (переміщень вздовж двох координатних осей і обертання навколо цих самих осей), називається подвійною напрямною базою. Для усунення можливості переміщення тіла вздовж осі ОY необхідно з’єднати його торець С двостороннім зв’язком – координатою y з площиною XOZ. Поверхня С позбавляє тіло одного ступеня вільності. Переміщення вздовж осі OY називається опорною базою. Для позбавлення тіла шостого ступеня точності (можливості обертання навколо власної осі) повинен бути передбачений шостий двосторонній зв’язок у вигляді опорної точки, що розташована на поверхні шпонкової канавки В. Поверхня В, яка несе в собі одну опорну точку і позбавляє тіло одного ступеня вільності (обертання навколо однієї з координатних осей), називається другою опорною базою. Реалізація теоретичної схеми базування найчастіше здійснюється за допомогою призм. 3.3 Базування диска Диск – це циліндрична деталь, у якої довжина циліндричної поверхні менша за діаметр. У зв’язку з цим можливості орієнтування деталі у циліндричної поверхні значно обмежені порівняно з циліндром, проте у торцевої поверхні такі можливості зростають. У відповідності з цим при орієнтуванні у просторі короткого циліндричного тіла (типу тонкого диску) необхідно з’єднати його торцеву поверхню А (рис. 8) трьома двосторонніми зв’язками (координатами) з площиною XOZ. При цьому тіло позбавляється трьох ступенів вільності: можливості переміщення вздовж осі OY і обертання навколо осей ОХ та OZ.
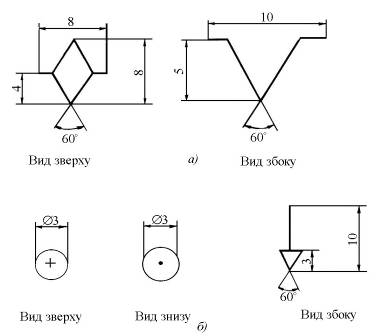
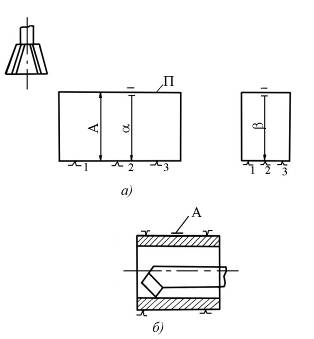
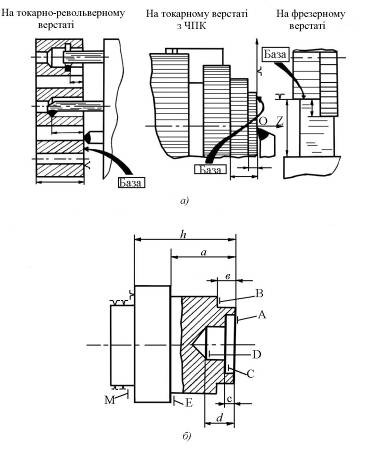
Рис. 8. Базування диска Для позбавлення тіла можливості переміщення вздовж осей ОХ та OZ необхідно з’єднати його циліндричну поверхню В двосторонніми зв’язками, тобто координатами Х та Z1 з площинами ХОY та YОZ; шостий двосторонній зв’язок, що позбавляє тіло можливості обертатись навколо власної осі, яка паралельна осі OY, створюється розташуванням опорної точки на поверхні шпонкової канавки С. При відповідній заміні двосторонніх зв’язків опорними точками торцьова поверхня А (рис. 8) диска, що контактує з трьома опорними точками, і яка позбавляє диск трьох ступенів вільності, називається установчою базою; циліндрична поверхня В, що контактує з двома опорними точками і позбавляє диск двох ступенів вільності, називається подвійною опорною (чи центруючою) базою, а поверхня шпонкової канавки С, що позбавляє диск одного ступеня вільності, – опорною базою. Необхідно зазначити, що схеми базування заготовок із внутрішніми циліндричними поверхнями принципово подібні розглянутим. 3.4 Базування конічного тіла Специфічні особливості має орієнтування у просторі конічних заготовок і деталей. При встановленні заготовки чи деталі по довгій конічній поверхні з відносно невеликою конусністю (отвори в шпинделях верстатів, конусні хвостовики різальних інструментів, конічні оправки “тертя”) конічна поверхня позбавляє деталь п’яти ступенів вільності (переміщення вздовж всіх трьох осей системи координат і обертання навколо двох осей системи координат), залишаючи їй тільки одну ступінь вільності – можливість обертання навколо власної осі, яка може розглядатись як третя вісь системи координат. Таким чином, в цьому випадку конічна поверхня суміщає в собі функції подвійної напрямної та опорної поверхні циліндричної деталі і може бути названа опорно-напрямною базою. Очевидно, що для повної орієнтації конічної заготовки чи деталі в просторі необхідно позбавити її ще одного ступеня вільності, розмістивши на одній із її поверхонь шосту опорну точку (шпонковий паз, лиска), яка називається опорною базою. Таким чином, повне базування конусної деталі, яке позбавляє її шести ступенів вільності, досягається при використанні комплекту двох баз: упорно-напрямної та опорної. При базуванні заготовки по короткій конічній поверхні з відносно великим кутом конуса (як це має місце при встановленні заготовки в центрах) умови базування значно змінюються. Конічна поверхня короткого центрового отвору не в змозі виконувати функції спрямування осі заготовки, і її можливості обмежуються виконанням функції центрування (аналогічно циліндричній поверхні диска, яка є подвійною опорною чи центруючою базою), а в деяких випадках доповнюються виконанням функції опорної бази. Незважаючи на зовнішню подібність задачі в орієнтуванні заготовки, ролі, виконувані лівим і правим центровими отворами, неоднакові. Лівий центровий отвір, стикається з нерухомим в осьовому напрямку центром передньої балки, виконує функції центрування і визначає положення заготовки в осьовому напрямку. Таким чином, він позбавляє заготовку трьох ступенів вільності (переміщення вздовж трьох осей координат) і несе на собі три опорні точки. За виконуваною функцією конічна поверхня переднього (лівого) отвору називається опорно-центруючою базою. Функція заднього центрового отвору, який стикається з рухомим в осьовому напрямку центром задньої бабки, обмежена виконанням центрування. Це поверхня контактує з двома опорними точками і позбавляє заготовку двох ступенів вільності (обертання навколо осей Y та Z системи координат). У відповідності з цим конічна поверхня заднього центрового отвору називається центруючою базою. Отже, встановлення заготовки в центрах позбавляє її п’яти ступенів вільності, зберігаючи можливість обертання заготовки навколо власної осі. Очевидно, що у випадку необхідності точної орієнтації положення заготовки з точки зору її обертання відносно осі (що буває необхідно, наприклад, у випадку несиметричних заготовок на фрезерних верстатах при їх встановленні в центрах, при нарізанні багатозахідних нарізок тощо) необхідно використовувати одну з допоміжних поверхонь заготовок як опорну базу, вводячи її в контакт з шостою опорною точкою та позбавляючи заготовку шостого ступеня вільності. 4. Правило шести точок. Повне і неповне базування Для забезпечення нерухомості заготовки або виробу у вибраній системі координат на них необхідно накласти шість двосторонніх геометричних зв’язків, для створення яких необхідний комплект баз, що несуть шість опорних точок. Ця умова отримала назву правила шести точок. Але необхідно пам’ятати, що при цьому маються на увазі жорсткі двосторонні зв’язки, виключаючи можливість будь-якого переміщення тіла вздовж цих зв’язків. При реалізації ж теоретичної схеми базування двосторонні зв’язки перетворюються в опорні точки і тим самим в односторонні зв’язки. Це означає, що досягнуте правильне положення деталі може змінитись під дією сил і моментів сил різання або складання. Для збереження одержаного при базуванні правильного положення деталі необхідно забезпечити неперервність контакту сполучених поверхонь деталей для жорсткого двостороннього зв’язку. Тому при реалізації теоретичної схеми базування не можна обмежуватись тільки створенням необхідних шести опорних точок, а необхідно ще забезпечувати щільне й неперервне стикання відповідних поверхонь деталі (опорних точок) за допомогою силового замикання. Якщо відповідно до службового призначення виріб повинен мати визначене число ступенів вільності, то відповідне число зв’язків знімається й замінюються кінематичними зв’язками. Наприклад, шпинделі верстатів повинні бути позбавлені п’яти ступенів вільності, при збереженні можливості обертання навколо своєї осі. Полозки супорта верстата повинні зберігати один ступінь вільності, що дозволяє здійснити їх переміщення по напрямних. При обробці на верстаті також не завжди використовуються всі шість опорних точок. Якщо при базуванні використовується весь комплект із трьох баз, які несуть шість опорних точок, то таке базування називається повним, якщо – не весь комплект баз, то таке базування називається неповним. В конструкторських задачах повне базування використовується в нерухомих сполученнях, неповне базування – при рухомих деталях. Приклади неповного і повного базування різних заготовок при їх обробці показані на наступних рисунках: рис. 9 – обробка заготовок при використанні однієї бази (рис. 9, а – фрезерування; 9, б – точіння); рис. 10 – обробка заготовок при використанні двох баз (рис. 10, а – фрезерування; рис. 10, б – точіння); рис. 11 – обробка заготовок при використанні трьох баз (фрезерування). Як видно з рис. 11, для забезпечення вказаних напрямків треба позбавити заготовку всіх шести ступенів вільності. Недотримання цієї вимоги призведе до недотримання одного або двох розмірів і поворотів (відносного положення). В той же час поява на цій схемі хоча б однієї заготовки опорної точки (сьомої) обов’язково призведе до невизначеності базування, що не забезпечить надійного досягнення тих чи інших заданих параметрів точності.
Рис. 9. Обробка заготовок при використанні однієї бази: а) – фрезерування; б) – точіння
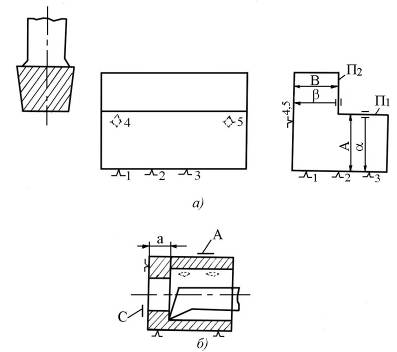
Рис. 10. Обробка заготовок при використанні двох баз: а) – фрезерування; б) – точіння
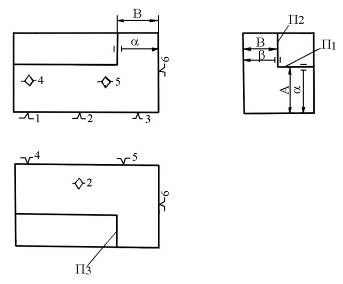
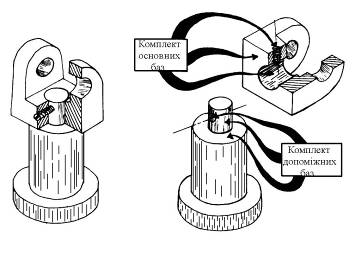
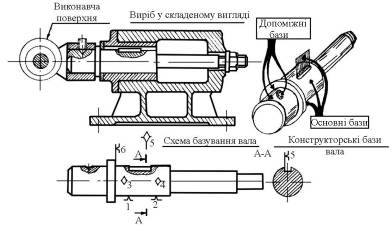
Рис. 11.Обробка заготовок при використанні трьох баз 5. Класифікація баз Бази відрізняються за призначенням, позбавленням ступенів вільності та характером прояву. За призначенням відрізняють бази конструкторські, технологічні та вимірювальні. Конструкторська база (КБ) служить для визначення положення деталі або складової одиниці у виробі. Конструкторською базою називається база деталі або складальної одиниці, відносно яких визначають на кресленнях розрахункове положення інших деталей або складальних одиниць, або інших поверхонь і геометричних елементів даної деталі. Дуже часто як конструкторську базу використовують геометричні елементи деталі: осьові лінії, бісектриси кутів, осі симетрії, ділильне коло зубчастого вінця тощо що зручно для оформлення креслень і розмірних розрахунків конструкцій. Конструкторська база може бути основною та допоміжною. Основна база – це конструкторська база, що належить даній деталі або складальній одиниці і використовується для визначення її положення у виробі. Допоміжна база – конструкторська база, що належить даній деталі або складальній одиниці і використовується для визначення положення приєднуваних до них виробів (рис. 12, 13) [5]. Технологічна база – це база, що використовується для визначення положення заготовки або виробу в процесі виготовлення або ремонту. Технологічна база (ТБ) при складанні – це поверхня, лінія або точка деталі чи складальної одиниці, відносно яких орієнтуються інші деталі або складальні одиниці виробу. Технологічна база при обробці – це поверхня, лінія або точка заготовки, відносно яких орієнтуються її поверхні, що обробляються на даному установленні. Як технологічні бази використовуються також лінії розмітки і точки, нанесені на матеріальні поверхні заготовок для вивірення останніх відносно пристосувань верстата, що визначають траєкторію руху різальних інструментів.
Рис. 12. Конструкторські бази
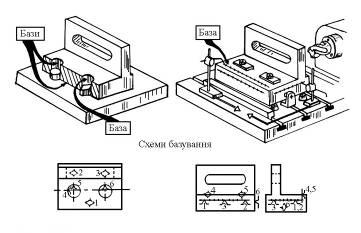
Рис. 13. Конструкторські бази Приклади технологічних баз показані на рис. 14 [5]. За особливостями застосування технологічні бази, що використовуються при механічній обробці, поділяються на контактні, настроювальні та перевіркові.
Рис. 1 Технологічні бази Контактними базами називають технологічні бази, які безпосередньо стикаються з відповідними установчими елементами пристроїв чи верстатів. Від цих баз можна витримати розмір безпосередньо при роботі на налагоджених верстатах з точністю даного методу обробки (див. приклади рис. 9–11). Контактні технологічні бази широко використовуються при роботі на налагоджених верстатах у великосерійному виробництві. Настроювальні бази – це поверхні заготовки, по відношенню до яких орієнтуються оброблені поверхні, і які зв’язані з ними безпосередніми розмірами і створюються при одному встановленні з поверхнями заготовки, що розглядаються. Настроювальна база звичайно зв’язана безпосереднім розміром з опорною базою заготовки, яка є технологічною базою для отримання лінійних розмірів тільки при обробці самої настроювальної бази, з якою вона зв’язана безпосереднім розміром (див. приклад рис. 15) [5].
Рис. 15. Настроювальні бази (а), використання настроювальної бази А при обробці заготовки на револьверному верстаті (б) Настроювальна база є технологічною для обробки всіх решти поверхонь. В залежності від конфігурації та висунутих до неї вимог заготовка може мати декілька настроювальних баз одного напрямку розмірів, що деякою мірою утруднює настроювання верстата, проте створює можливість безпосереднього проставлення розмірів між поверхнями, взаємне розташування яких важливе для готового виробу. Часто різальний інструмент переміщується від однієї обробленої поверхні заготовки до другої на визначену кресленням відстань за допомогою спеціальних шаблонів, відлікових пристосувань верстата або згідно заданої програми. Очевидно, що в подібних випадках можна використовувати декілька настроювальних баз різних напрямків. Застосування настроювальних технологічних баз значно розширює можливості проставлення розмірів на кресленнях заготовок, оскільки дозволяє встановлювати розміри без підвищення їх точності не тільки безпосередньо від опорних поверхонь, але й від вимірювальних баз, які можна використати як настроювальні. Настроювальні бази сприяють спрощенню конструкції пристроїв, концентрації операцій технологічного процесу та скороченню загальної кількості операцій, а також дають можливість проводити вимірювання заготовок безпосередньо на верстаті. Деяке ускладнення налагодження верстата, пов’язане з використанням настроювальної бази, компенсується у великосерійному виробництві вказаними перевагами застосування цих баз. Особливо чітко виявляються переваги настроювальних баз при використанні автоматів, багаторізцевих верстатів, верстатів з копіювальними пристосуваннями, верстатів з ЧПК та ОЦ, які потребують створення складних концентрованих операцій, а також при багатопозиційній обробці. При використанні настроювальних баз скорочується кількість встановлень деталей, що веде до підвищення точності обробки. Перевіркові технологічні бази – це поверхня, лінія або точка заготовки чи деталі, по відношенню до яких проводиться вивірення положення заготовки на верстаті або встановлення різального інструменту при обробці заготовки, а також вивірення положення інших деталей чи складальних одиниць при складанні виробу (див. приклад, рис. 16) [5]. З прикладу видно, що при роботі по технологічних перевіркових базах точність та якість опорних поверхонь заготовки (площина В) (рис. 16, б.) не суттєво впливають на точність обробки заготовки. Цей метод не потребує застосування складних пристроїв для орієнтування заготовки на верстаті, необхідних при обробці за методом опорних баз. Вказані переваги забезпечили широке поширення цього методу в дрібносерійному та індивідуальному виробництвах важкого машинобудування, де виготовлення складних пристроїв і додаткова точна обробка контактних баз нерентабельна, а збільшені витрати часу на вивірення заготовки на верстаті незначні у порівнянні з загальним часом обробки заготовки (але це вирішується все ж таки техніко-економічним розрахунком). |
|
|||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, курсовые работы, реферат, доклады, рефераты, рефераты скачать, рефераты на тему, сочинения, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||