|
Курсовая работа: Автоматизированный электропривод центрифуги
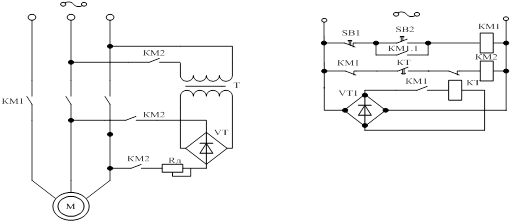
Рисунок 7.2 Механическая характеристика асинхронного двигателя при динамическом торможении Реализовать схему динамического торможения можно следующим образом:
Рисунок.7.3 Схема динамического торможения асинхронного двигателя. 8. Анализ статических характеристик ЭП и требования предъявляемые к ЭП (Определение структуры настроек регулятора) построение статических характеристик СУЭП На практике существуют различные способы управления частотой вращения асинхронного двигателя. Среди них управление напряжением питания, магнитным потоком, количеством пар полюсов, введением добавочного сопротивления в цепь ротора (для АД с фазным ротором) и др. Однако в последнее время наиболее распространенным методом регулирования скорости асинхронного двигателя является способ управления частотой питающей сети. Кроме того заметим, что статическая характеристика ЭП является астатической, соответственно частотное управление будет оптимальным для данной системы. [2] Различают два основных способа частотного управления: частотное управление, при котором в качестве управляющих воздействий приняты частота и напряжение статора; частотное управление, при котором в качестве управляющих воздействий приняты частота и ток статора. Второй способ называют частотно-токовым управлением. Формирование механических характеристик асинхронных двигателей при частотном управлении, как и при управлении двигателями постоянного тока, подчинено задачам обеспечения требуемой перегрузочной способности и жесткости характеристик во всем диапазоне регулирования скорости. Заданная перегрузочная способность обеспечивается путем выполнения определенных соотношений между частотой и напряжением статора. Жесткость механических характеристик может быть сколь угодно высокой при использовании обратных связей по скорости. Следует подчеркнуть, что и без обратных связей по скорости жесткость механических характеристик частотно-управляемых электроприводов переменного тока оказывается более высокой, чем у приводов постоянного тока. Это обстоятельство способствует применению простых систем управления асинхронными электроприводами, не оснащенными датчиками скорости и контурами регулирования скорости. Поскольку для центрифуг периодического действия характерно то, что момент инерции центрифуг может в 20-100 раз превышать момент инерции двигателя, причем в процессе работы центрифуги значение его изменяется в широких пределах в связи с выделением жидкой фазы из обрабатываемого продукта, то необходимо вводить обратную связь не только по току, но и скорости. [3]
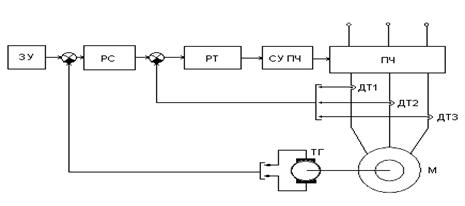
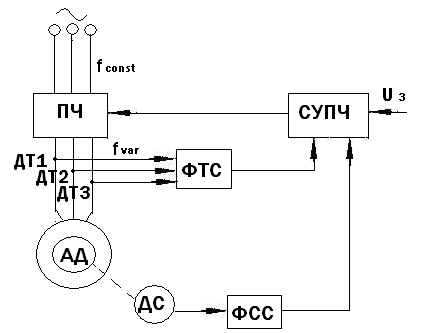
Рис.8.1 Функциональная схема СУЭП Функциональную схему СУЭП можно представить в следующем виде:
Рисунок.8.2 Функциональная схема СУЭП. ПЧ - преобразователь частоты; СУПЧ - система управления ПЧ; ФТС - формирователь токового сигнала, ФСС - формирователь сигнала скорости; ДС - датчик скорости; ДТ1, ДТ2, ДТЗ - датчики тока. Автономный инвертор тока с полной коммутирующей емкостью.
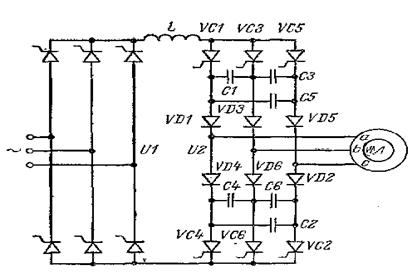
На рисунке 8.3 изображена схема трехфазного
инвертора тока с полной коммутирующей емкостью." Трехфазный
тиристорный выпрямитель U выпрямляет ток сети,
и выпрямленный ток сглаживается дросселем L. Тиристоры
инвертора тока К достоинствам схемы следует отнести сравнительную простоту и благоприятную для тиристоров форму коммутационного напряжения. Наряду с достоинствами имеются й недостатки: вольтамперная характеристика является крутопадающей, причем на холостом ходу напряжение может превышать напряжение источника постоянного тока в десятки раз; емкость конденсаторов должна быть большой, при снижении частоты и при постоянном моменте на валу она возрастает обратно пропорционально квадрату частоты; большая емкость, выбранная из условия низшей частоты, может повлечь за собой на более высоких частотах конденсаторное самовозбуждение асинхронного двигателя, вызывающее самораскачивание системы "инвертор-двигатель", которое приводит к срыву коммутации и короткому замыканию источника питания. Инверторы тока с полной коммутирующей емкостью применяют в основном в качестве источников повышенной частоты, при стабильной выходной частоте или при малых пределах изменения последней. При изменении нагрузки в широких пределах применяют регуляторы отбора реактивной мощности, представляющие собой три линейные индуктивности, последовательно с каждой из которых включаются встречно-параллельные тиристоры. Включение регулятора отбора реактивной мощности параллельно коммутирующим конденсаторам дает возможность стабилизировать выходное напряжение инвертора тока.
Рисунок 8.3 Схема инвертора тока с ограниченной коммутирующей емкостью. В АИТ, наоборот, очередность коммутации тиристоров определяет форму тока, а форма напряжения зависит от нагрузки. Это обусловлено включением на вход инвертора реактора с достаточно большой индуктивностью. Основной недостаток систем с одним регулятором - сложность настройки параметров цепей ОС по току и скорости. Настройка носит компромиссный характер и не является оптимальной. Этот недостаток исключен в системах с подчиненным (каскадным) регулированием. Каскадная система - это многоконтурная система, в каждом контуре которой имеется одна регулируемая величина и регулятора этой величины. При этом каждый внешний контур является задающим для своего внутреннего, т.е. в этом смысле внутренний контур подчинен внешнему. Настройка (оптимизация) этих систем производится независимо и последовательно от внутреннего к внешнему. Достоинства данной системы управления: система обеспечивает высокие статические и динамические характеристики; структура и сами элементы стандартизованы, что упрощает изготовление, наладку и ремонт; применяются стандартные регуляторы и настройки. В системе частотно-токового управления двигатель питается от тиристорного преобразователя (ТП) частоты с автономным инвертором тока (АИТ). В таком случае управляемый выпрямитель (УВ) совместно с контуром регулирования тока выпрямителя образует источник тока. Управление двигателем производится путём задания тока статора и частоты АИТ. Обе величины, в свою очередь, зависят от общего сигнала задания на систему, определяющего скорость двигателя. Ток статора связан также с нагрузкой двигателя. Принцип работы данной системы заключается в следующем: в контуре скорости, напряжение задания (Uз), сравнивается с напряжением поступающем с датчика скорости, который реализуется на тахогенераторе, пропорциональным скорости асинхронного двигателя. На основе разности напряжений регулятор скорости (РС) формирует сигнал управления АИТ. Последний в свою очередь задает частоту тока статора. Выходной сигнал поступает на регулятор тока (РТ) и сравнивается с током статора, измеренного с помощью датчика тока (ДТ) (трансформатор тока). Отрицательная обратная связь по току обеспечивает необходимую точность контура тока. Выходной сигнал регулятора тока поступает на управляемый выпрямитель (УВ), где формируется закон изменения тока статора. Регулятор скорости воздействует на автономный инвертор тока, а регулятор тока - на управляемый выпрямитель. Подобное разделение позволяет обеспечить высокое качество переходных процессов. Для того чтобы смоделировать систему управления ЭП принимаем нелинейную характеристику АД в виде линейной зависимости, приняв следующие допущения: возмущение имеет скачкообразный характер своего изменения (наброс и сброс статического момента нагрузки); значение возмущения не превышает максимального момента, развиваемого двигателем, т.е. до и после возмущения асинхронный двигатель работает на устойчивой части своей механической характеристики; т.к. двигатель работает совместно с ЧП, следовательно работа происходит на устойчивой части механической характеристики, которая описывается следующим выражением:
где sмакс - значение максимального
скольжения, s - текущее значение скольжения, Мдв
- момент развиваемый асинхронным двигателем, Запишем уравнение движения в таком виде:
где z - число пар полюсов двигателя. Это уравнение совместно с (8.1) составляют систему, описывающую поведение асинхронного двигателя в переходных процессах с учётом электромагнитных явлений. Если принять, что до наброса нагрузки двигатель работал в установившемся режиме, то эту точку можно положить точкой с нулевыми начальными условиями для последующего переходного процесса. После соответствующих преобразований, подстановки одного в другое и приведения к операторной форме рассматриваемая система примет вид:
где
Перейдем к определению настроек регуляторов. Для этого для начала синтезируем сам двигатель. Для двигателя переменного тока передаточная функция в общем случае можно записать в виде произведения апериодического звена первого порядка и интегрирующего звена:
где β - жесткость механической характеристики.
где ωном - номинальная скорость электродвигателя; Sном - номинальное скольжение; Мном - номинальный момент двигателя, кг·м.
Рассчитаем коэффициенты обратной связи по скорости и по току. Кос - коэффициент обратной связи по скорости:
Кот - коэффициент обратной связи по напряжению:
Определим передаточную функцию преобразователя частоты вместе с выпрямителем:
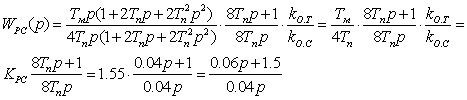
Tn - постоянная времени коммутации для транзисторов. Определим Wрн - передаточная функция регулятора тока;
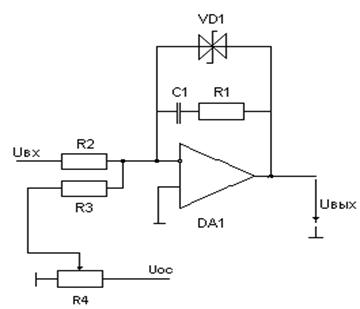
Схемная реализация регулятора тока на операционном усилителе будет выглядеть следующим образом:
Рисунок.8.4 Принципиальная схема регулятора тока. Данный регулятор одновременно является и сумматором, суммируя сигнал обратной связи по току и выход регулятора скорости, который является заданием для регулятора тока. Для рассчитанных настроек регулятора определим номиналы элементов в регуляторе тока. Коэффициент усиления регулятора:
Выбираем из ряда сопротивлений следующие резисторы: R1=100кОм, R2=R3=220кОм. Время интегрирования:
Тогда С1=430 нФ. Резистор R4 служит для подстройки параметров ПИ - регулятора. Двуханодный стабилитрон служит для ограничения регулирующего воздействия в пределах 12В. Переходим к расчёту регулятора скорости. Определим Wрс - передаточная функция регулятора скорости; В качестве регулятора скорости также возьмем ПИ - регулятор, который обеспечивает точность регулирования скорости в статическом режиме. Передаточная функция регулятора скорости
где:
Принципиальная схема регулятора скорости будет аналогична схеме регулятора тока. Только заданием для регулятора скорости служит выход задатчика интенсивности, а вместо Uoc по току подается сигнал обратной связи по скорости. Рассчитаем номиналы элементов в регуляторе скорости. Коэффициент пропорциональности регулятора скорости:
Время интегрирования:
Тогда номиналы элементов выберем следующие: R15=180кОм, R16=R17=120кОм, C13=330 мкФ. Схема задающего устройства будет выглядеть следующим образом:
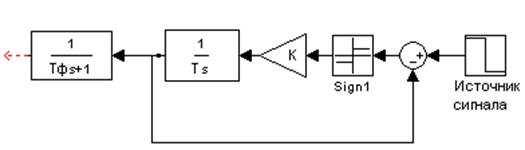
Рисунок.8.5 Структурная схема задающего устройства. где: Тф - постоянная времени фильтра. Рассчитывается исходя из того, что она должна быть равна от 0.1 до 0.05 времени переходного процесса. Для нашего случая выбираем Тф=0.1 T - время разгона двигателя до номинальной частоты вращения. Т=2с. K - максимальное напряжение на выходе источника сигнала задания. Для нашего случая К=15. Схемная реализация задачтика интенсивности будет выглядеть следующим образом:
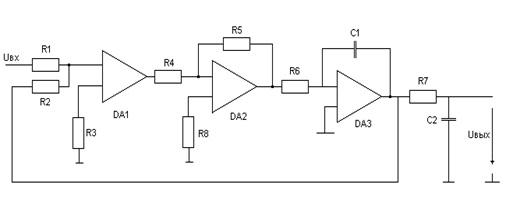
Рисунок.8.6 Принципиальная схема задатчика интенсивности Где номиналы элементов в соответствии со значениями параметров системы регулирования рассчитываются по следующим формулам:
Исходя из данных формул и в соответствии со значениями номинального ряда напряжений, выбираем: R5=150кОм, R4=100кОм, R6=200кОм, C1=10мкФ, R7=100кОм, С2=1мкФ. Подставим рассчитанные значения регуляторов и коэффициентов обратных связей в структурную схему САУ и получим законченный вариант замкнутой системы электропривода: Рассчитаем βз. с, который обеспечивает частоту вращения двигателя 1500 об/мин. βз. с = Данные расчётов приведены в приложении II Расчёт производится при помощи пакета Matlab 6.5, а моделирование переходных процессов в приложении Simulink пакета Matlab 6.5 Подставим рассчитанные значения регуляторов и коэффициентов обратных связей в структурную схему САУ и получим законченный вариант замкнутой системы электропривода:
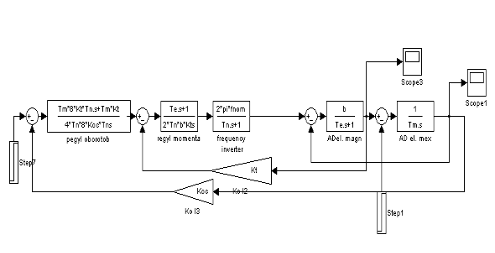
Рис.8.6 Структурная схема системы регулирования.
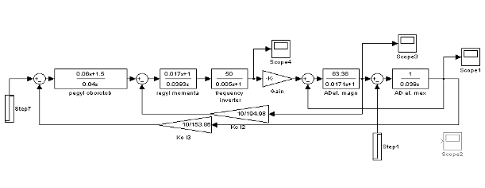
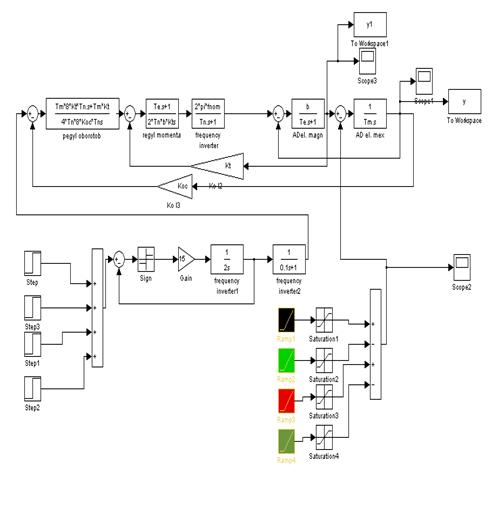
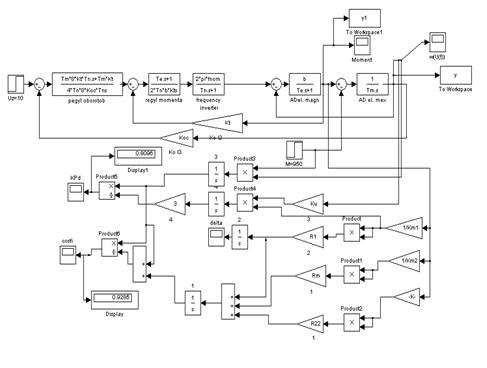
Рисунок.8.7 Структурная схема системы регулирования с параметрами.
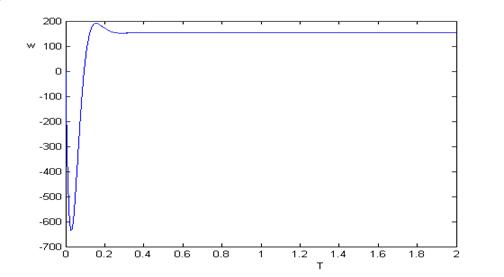
Рисунок.8.8 Переходная характеристика по скорости.
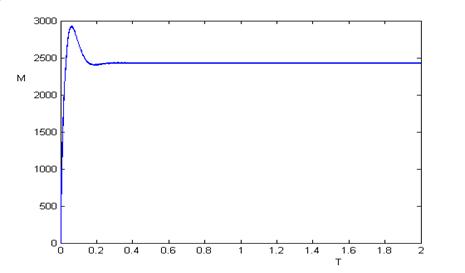
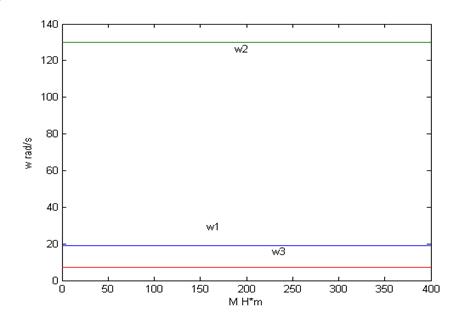
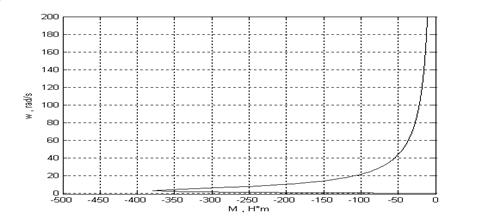
Рисунок.8.9 Переходная характеристика электромагнитного момента. С учетом того, что мы синтезировали астатическую систему управления, то статические характеристики системы при различных частотах питающего двигатель напряжения будут представлять собой горизонтально-расположенные линии в координат М-w
Рисунок.8.10. Статические характеристики СУЭП. 9. Моделирование переходных процессов СУЭП за цикл работы, определение основных энергетических показателей (ΔР,COSφ). 9.1 Моделирование переходных процессов СУЭП за цикл работы Для расчета переходных процессов синтезируем схему: в Приложении II
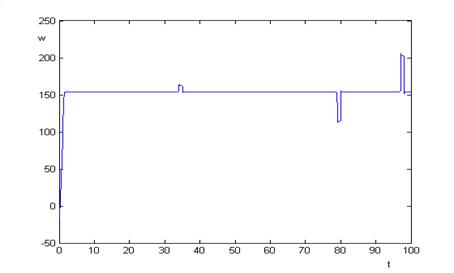
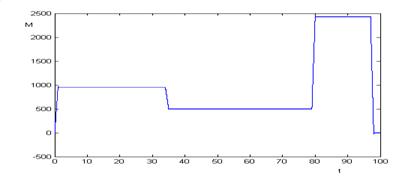
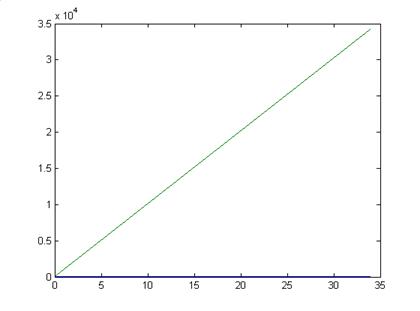
График переходных процессов скорости за цикл работы приведен на рис 9.1. График переходных характеристик моментов за цикл работы приведены на рис.9.2:
Рисунок 9.1.
Рисунок 9.2. 9.2 Определение основных энергетических показателей (ΔР,COSφ)Потери мощности в регулируемом электроприводе равны:
где
Потери мощности в электродвигателе можно условно разделить на постоянные и переменные:
Под постоянными, понимают потери не зависящие от нагрузки. К ним относятся: потери в стали, механические потери, вентиляционные потери, потери на возбуждение электродвигателя. Постоянные потери в действительности не являются постоянными, а изменяются с изменением угловой скорости, частоты, напряжения, но при работе двигателя на естественной характеристике их изменения незначительны. Под переменными потерями понимают потери мощности, зависящие от нагрузки. При частотном управлении АД постоянные потери можно записать в виде:
где f, fном - текущее и номинальное значение частоты тока статора;
m=1,4 - коэффициент зависящий от сорта электротехнической стали. Переменные потери мощности при частотном управлении АД определяются из соотношения:
Для построения графика переменных потерь, а также для определения КПД двигателя за цикл работы и определения cosφ воспользуемся пакетом Simulink пакета Matlab 6.5, для этого синтезируем схему:
Расчёты приведены в Приложении II
Рисунок 9.4 Потери мощности за цикл работы
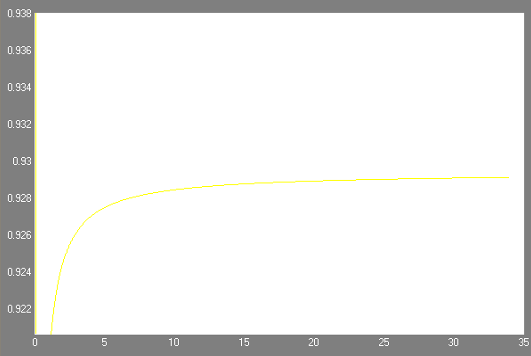
Рисунок 9.5 COSφ за цикл работы
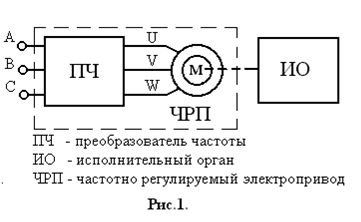
Рисунок 9.6 КПД за цикл работы 10. Проектирование функциональной схемы ЭП. Расчет и выбор силовых элементов ЭП В качестве устройства управления ЭП используем частотно регулируемый привод.
Современный частотно регулируемый электропривод состоит из асинхронного или синхронного электрического двигателя и преобразователя частоты (см. рис 8.1 раздел 8). Электрический двигатель преобразует электрическую энергию в механическую энергию и приводит в движение исполнительный орган технологического механизма. Преобразователь частоты управляет электрическим двигателем и представляет собой электронное статическое устройство. На выходе преобразователя формируется электрическое напряжение с переменными амплитудой и частотой. В наиболее распространенном частотно регулируемом приводе на основе асинхронных двигателей с короткозамкнутым ротором применяются скалярное и векторное частотное управление. Векторное управление позволяет существенно увеличить диапазон управления, точность регулирования, повысить быстродействие электропривода. Этот метод обеспечивает непосредственное управление вращающим моментом двигателя. Векторное управление позволяет существенно увеличить диапазон управления, точность регулирования, повысить быстродействие электропривода. Этот метод обеспечивает непосредственное управление вращающим моментом двигателя. Вращающий момент определяется током статора, который создает возбуждающее магнитное поле. При непосредственном управлении моментом необходимо изменять кроме амплитуды и фазу статорного тока, то есть вектор тока. Этим и обусловлен термин "векторное управление". Для управления вектором тока, а, следовательно, положением магнитного потока статора относительно вращающегося ротора требуется знать точное положение ротора в любой момент времени. Задача решается либо с помощью выносного датчика положения ротора, либо определением положения ротора путем вычислений по другим параметрам двигателя. В качестве этих параметров используются токи и напряжения статорных обмоток. Менее дорогим является частотно регулируемый электропривод с векторным управлением без датчика обратной связи скорости, однако векторное управление при этом требует большого объема и высокой скорости вычислений от преобразователя частоты. Кроме того, для непосредственного управления моментом при малых, близких к нулевым скоростям вращения работа частотно регулируемого электропривода без обратной связи по скорости невозможна. Векторное управление с датчиком обратной связи скорости обеспечивает диапазон регулирования до 1: 1000 и выше, точность регулирования по скорости - сотые доли процента, точность по моменту - единицы процентов. Вращающий момент определяется током статора, который создает возбуждающее магнитное поле. При непосредственном управлении моментом необходимо изменять кроме амплитуды и фазу статорного тока, то есть вектор тока. Этим и обусловлен термин "векторное управление". Для управления вектором тока, а, следовательно, положением магнитного потока статора относительно вращающегося ротора требуется знать точное положение ротора в любой момент времени. Задача решается либо с помощью выносного датчика положения ротора, либо определением положения ротора путем вычислений по другим параметрам двигателя. В качестве этих параметров используются токи и напряжения статорных обмоток. Менее дорогим является частотно регулируемый электропривод с векторным управлением без датчика обратной связи скорости, однако векторное управление при этом требует большого объема и высокой скорости вычислений от преобразователя частоты. |
|
|||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, курсовые работы, реферат, доклады, рефераты, рефераты скачать, рефераты на тему, сочинения, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||

 , (8.1)
, (8.1) , (8.3)
, (8.3) .
.