|
Курсовая работа: Автоматизированный электропривод центрифуги3. Двигатели, применяемые в электроприводе Двигатели, применяемые в электроприводе разделяются на две группы: двигатели, предназначенные для привода механизмов длительного режима работы с неизменной (мало меняющейся) нагрузкой; двигатели, работающие в динамических режимах. Первая группа двигателей предназначена для следующих механизмов: насосы, вентиляторы, компрессоры, насосы, воздуходувки, транспортеры, дробилки, сушилки и т.д. Это электрические машины общего назначения: асинхронные двигатели серий АИ, 2АИ, АИР, 4А, двигатели постоянного тока серий 4П, 2П, П, синхронные двигатели СДН, СДН3, СДК, СДКП. Вторая группа двигателей предназначена для механизмов с частыми пусками, торможениями, реверсами и большой частотой включения. Как правило, это механизмы кратковременного и повторно-кратковременного режимов работы (подъемники, лебедки, краны, лифты, манипуляционные механизмы роботов и т.д.). Наиболее характерными для промышленных электроприводов являются три режима работы. Продолжительным номинальным режимом работы (S1) электрической машины называется режим ее работы при неизменной нагрузке такой продолжительностью, что превышения температуры всех частей машины достигают установившихся значений. [1] Кратковременным номинальным режимом работы (S2) электрической машины называется режим, при котором период неизменной нагрузки чередуется с периодом отключения машины, при том периоды нагрузки не настолько длительны, чтобы превышения температуры машины могли достигнуть установившихся значений, а периоды отключения настолько длительны, что все ее части охлаждаются до температуры охлаждающей среды. Для кратковременного режима работы рекомендуются продолжительности рабочего периода tр 15, 30, 60, 90 мин. Повторно-кратковременным номинальным режимом работы (S3) называется режим работы электрической машины, при котором кратковременные периоды неизменной номинальной нагрузки - рабочие периоды - чередуются с периодами отключения машины - паузами, причем как рабочие периоды, так и паузы не настолько длительны, чтобы превышения температуры частей машины могли достигнуть установившихся значений. Повторно-кратковременный режим работы характеризуется относительной продолжительностью включения. Для центрифуг периодического действия характерно то, что момент инерции центрифуг может в 50-100 раз превышать момент инерции двигателя, причем в процессе работы центрифуги значение его изменяется в широких пределах в связи с выделением жидкой фазы из обрабатываемого продукта. Это характерно для всех центрифуг периодического действия. Для центрифуг периодического действия при расчете мощности электродвигателя необходимо учитывать динамические моменты, возникающие при переходных процессах и составляющие при больших моментах инерции центрифуг весьма значительную величину. Для центрифуг периодического действия широко применяются многоскоростные АД. Выполним операцию приведения моментов сопротивления, действующих на центрифугу, к валу двигателя. Статический момент на валу рабочей машины, приведенный к валу электродвигателя, без учета потерь в передаче определяется выражением:
где Мм - момент сопротивления на валу рабочей машины; j - передаточное число. автоматизированный электропривод центрифуга двигатель Передаточное число рассчитаем из условия соблюдения соответствия максимальных скоростей электродвигателя и механизма с учетом регулирования, то есть максимальная скорость вращения центрифуги за цикл работы должна соответствовать номинальной скорости вращения двигателя.
для механизма
Приведем моменты к валу электродвигателя:
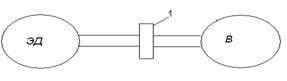
Кинематическая схема:
Нагрузочная диаграмма электропривода представляет собой зависимость электромагнитного момента М, тока I или мощности Р от времени. В тех случаях, когда момент и ток связаны линейной (или примерно линейной) зависимостью, обычно нагрузочную диаграмму строят для момента, который определяют из основного уравнения движения электропривода:
где МС - статический момент на валу двигателя; Мдин - динамический момент электропривода; JΣ - суммарный момент инерции электропривода, кг·м². Динамический момент электропривода Мдин определим приближенно, принимая линейным закон изменения скорости, т.е.
где ωуст - установившаяся скорость двигателя на данном участке скоростной диаграммы, рад/с; tп. т. - время пуска (торможения), с; εдоп - допустимое угловое ускорение (замедление), рад/с В нашем случае допустимое ускорение выберем, исходя из обычных условий запуска двигателя:
Определим угловое ускорение. Для этого предположим, что время разгона нашего двигателя до номинальной скорости будет равно 5 секунды, тогда: Определим суммарный момент инерции электропривода:
где δ=1,15÷1,3 - коэффициент, учитывающий момент инерции вращающихся масс передаточного механизма; Jдв - момент инерции ротора двигателя; Jмуф - момент инерции соединительной муфты, тормоза и других частей механизма, непосредственно связанных с валом двигателя; Jм - момент инерции вращающихся частей механизма; j - передаточное число редуктора; m - масса поступательно движущихся частей механизма, кг; ρ - радиус приведения. В нашем случае суммарный момент инерции будет равен:
Далее определим моменты на каждом интервале нагрузочной диаграммы работы центрифуги. Исходя из основного уравнения электропривода:
В соответствии с заданным циклом работы электропривода, рассчитаем три момента системы:
Естественный останов двигателя после выключения обеспечивает
тормозной момент
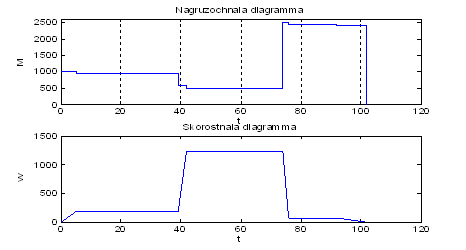
На основе произведенных расчетов строим упрощенную нагрузочную и скоростную диаграмму электропривода. t= [0 5 5 39 39 42 42 74 74 76 76 92 92 102 102] y= [1013 1013 950 950 563 563 500 500 2493 2493 2430 2430 2398 2398 0] figure (1) subplot (2,1,1) plot (t,y) xlabel ('t') ylabel ('M') title ('Nagruzochnaia diagramma') T= [0 5 39 42 74 76 92 102] R= [0 180 180 1240 1240 70 70 0] figure (1) subplot (2,1,2) plot (T,R) xlabel ('t') ylabel ('w') title ('Skorostnaia diagramma')
Рисунок.4.1 Упрощенная нагрузочная и скоростная диаграмма электропривода. 5. Проверка выбранного двигателя по нагреву, пусковой и перегрузочным способностям Упрощенная нагрузочная диаграмма используется для предварительной проверки двигателя по нагреву, пусковой и перегрузочной способностям. Для проверки двигателя по нагреву используется несколько методов: метод средних потерь и методы эквивалентных величин (тока, момента и мощности). Первый из них является наиболее точным, остальные же (методы эквивалентных величин) отличаются большей удобностью применения, но меньшей точностью. Для двигателей, работающих с постоянным магнитным потоком (двигатели постоянного тока независимого и параллельного возбуждения, асинхронные двигатели, работающие при скольжениях, меньших критического), наиболее часто применяется метод эквивалентного момента, для которого условием правильного выбора двигателя по нагреву является условие:
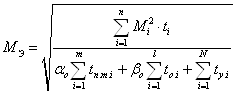
Эквивалентный момент двигателя, работающего в кратковременном режиме с переменной нагрузкой определяется следующим образом:
tо. i - продолжительность i-ой паузы; tn. m. i - продолжительность пуска (торможения) на i-ом интервале; tу. i - продолжительность установившегося движения на i-ом интервале; l - количество пауз; m - число интервалов пуска и торможения; n - число рабочих интервалов в цикле; N - количество интервалов установившегося движения; αо - коэффициент ухудщения условий охлаждения при пуске, торможении двигателя с самовентиляцией (αо≈0,75 для двигателей постоянного тока; αо≈0,5 для асинхронных двигателей); βо - коэффициент, учитывающий ухудшение охлаждения самовентилируемого двигателя при отключении (βо=0,5 для закрытых двигателей и βо=0,3 для защищенных). В нашем случае
Таким образом, условие проверки двигателя на нагрев выполняется:
По приближенной нагрузочной диаграмме двигатель также проверяется и по перегрузочной способности в соответствии с условием
где МС. МАХ - максимальное значение статического момента на валу двигателя; λm - допустимый коэффициент перегрузки двигателя по моменту. Максимально допустимый момент асинхронного двигателя необходимо рассчитывать с учетом возможного снижения питающего напряжения на 10%:
Для выбранного двигателя получаем:
Условие адекватности выбора двигателя по перегрузочной способности выполняется:
Проверка выбранного двигателя по пусковым условиям производится в соответствии со следующим условием:
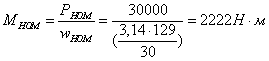
где МС. МАХ - максимальное значение статического момента на валу двигателя при пуске; λП - кратность пускового момента двигателя; МНОМ - номинальный момент двигателя. С учетом характеристик выбранного двигателя получаем:
То есть двигатель приемлем по критерию пусковой способности:
Делаем вывод о правильном выборе электродвигателя. 6. Расчет недостающих параметров электродвигателя Найдем теперь параметры необходимые для построения структурной схемы, а также те параметры, которые понадобятся для ее анализа. [3] Рассчитаем номинальный ток двигателя: Номинальный фазный ток статора, А:
Полное сопротивление короткого замыкания, Ом:
где λI - кратность пускового тока. Приведенное активное сопротивление фазы ротора, Ом:
nо - скорость идеального холостого хода, об/мин. Активное сопротивление фазы статора:
где cosφпуск - коэффициент мощности при пуске
где γ1 - отношение мощности потерь мощности в обмотке статора при номинальной нагрузке к полным номинальным потерям,
Индуктивное сопротивление короткого замыкания, Ом:
Тогда активное сопротивление фазы статора:
Индуктивные сопротивления рассеяния статора и ротора примерно равны, Ом:
Ток холостого хода асинхронного короткозамкнутого двигателя, А:
где sк - критическое скольжение, которое можно определить по формуле
λm,λп - кратность максимального и пускового моментов. где sк - критическое скольжение. Построим механическую характеристику двигателя. Расчет производился в Приложение I
Рисунок 6.1 Механическая характеристика двигателя с короткозамкнутым ротором. Приведенный ток ротора:
Потери мощности при холостом ходе, Вт:
Коэффициент мощности при холостом ходе двигателя:
Индуктивное сопротивление намагничивающего контура, Ом:
Активное сопротивление намагничивающего контура
или где ∆Рсm - потери в стали статора, Вт
Электромеханическая постоянная времени асинхронного электропривода для линейной части механической характеристики определяется по формуле:
где w0 - скорость идеального холостого хода, 1/с; J - суммарный момент инерции ЭП, кг*м2 (J=2.44); Мном - номинальный момент, H*m Тогда для линейной части механической характеристики постоянная времени будет следующая:
Электромагнитная постоянная времени АД, с:
Имея параметры электропривода, приступаем к расчету и построению статических электромеханических и механических характеристик, которые обеспечивают требуемые режимы работы на каждом интервале нагрузочной и скоростной диаграмм. 7. Регулирование скорости в системе преобразователь частоты-двигатель переменного тока Этот способ регулирования скорости перспективен как для отдельных регулируемых АД и СД, так и при одновременном изменении скорости нескольких АД, приводящих в движение группы механизмов. Когда требуется получить высокие скорости, например, центрифуг, шлифовальных станков, регулирование скорости АД изменением частоты питающего напряжения предпочтительно, а в некоторых случаях это и единственно возможный способ [6]. Возможность регулирования скорости АД при изменении частоты следует непосредственно из выражения:
При регулировании частоты необходимо изменять и значение питающего
двигатель напряжения. Это объясняется тем, что при неизменном напряжении источника
питания При выборе соотношения между частотой и напряжением, подводимым к статору АД, исходят из условия сохранения перегрузочной способности:
Закон изменения напряжения при частотном изменении скорости АД, удовлетворяющий данному требованию, имеет следующий вид:
где
В относительных единицах закон изменения напряжения при частотном регулировании выражается:
Механические характеристики АД при частотном регулировании скорости различны для различных зависимостей статической нагрузки от скорости. В нашем случае закон изменения напряжения при частотном управлении АД примет вид (в относительных единицах):
Получим вид механических характеристик для каждого режима работы АД в соответствии с принятым циклом работы. Для этого сначала определим необходимые частоты питающего двигатель напряжения, исходя из желаемых частот вращения АД на каждом из участков цикла:
Далее для каждого из участков цикла рассчитаем необходимое изменение подводимого напряжения, а также значения критического момента и скольжения двигателя на каждой из механических характеристик. 1-ый участок цикла:
2-ой участок цикла:
3-ий участок цикла:
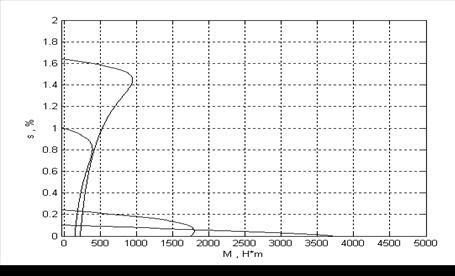
Построим механические характеристики двигателя для каждого из участков работы электропривода. Для этого используем формулу Клосса. Следует отметить, что характеристики, построенные по данной формуле имеют значительные погрешности в области S< Sk
Результаты расчётов приведены в приложении I
Рисунок.7.1 механические характеристики двигателя для каждого из участков работы электропривода. Механическая характеристика асинхронного двигателя при динамическом торможении без учета насыщения магнитной цепи (хμ=х0=const) описывается уравнением
где Iэ - эквивалентное значение тока статора, определяемое как
ксх - коэффициент, зависящий от схемы включения обмоток
статора к источнику постоянного тока. В частности, при подключении последовательно
двух фаз статора к источнику постоянного тока |
|
|||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, курсовые работы, реферат, доклады, рефераты, рефераты скачать, рефераты на тему, сочинения, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||

 , (5.1)
, (5.1)
 , (6.2)
, (6.2)
 , (6.14)
, (6.14) , (6.16)
, (6.16)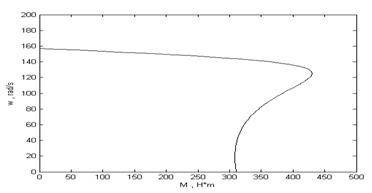
 , (6.17)
, (6.17) .
. , (7.3)
, (7.3)
 , где
, где ;
;
