|
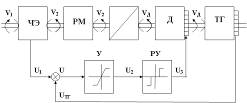
Дипломная работа: Разработка автоматизированной системы для исследования устойчивости и автоколебаний в электромеханической следящей системеОднако увеличение общего коэффициента усиления ограничивается устойчивостью системы регулирования. При повышении коэффициента усиления, как правило, система приближается к колебательной границе устойчивости. При некотором предельном его значении в системе возникают незатухающие колебания. В этом сказывается противоречие между требованиями к точности и требованиями к устойчивости системы регулирования. В связи с этим повышение общего коэффициента усиления до значения, при котором обеспечивается выполнение требований к точности, обычно может производиться только при одновременном повышении запаса устойчивости системы, что осуществляется при помощи так называемых корректирующих средств Под улучшением качества процесса регулирования, помимо повышения точности в типовых режимах, понимается изменение динамических свойств системы регулирования с целью получения необходимого запаса устойчивости и быстродействия. В этой проблеме основное значение имеет обеспечение запаса устойчивости. Это объясняется тем, что стремление снизить ошибки системы регулирования приводит, как правило, к необходимости использовать такие значения общего коэффициента усиления, при которых без принятия специальных мер, система вообще оказывается неустойчивой. При решении задачи повышения запаса устойчивости проектируемой системы регулирования, прежде всего, необходимо попытаться рациональным образом изменить ее параметры (коэффициенты передачи отдельных звеньев, постоянные времени и т.п.) так, чтобы удовлетворить требованиям качества регулирования, которые определяются критериями качества. При невозможности решить эту задачу в рамках имеющейся системы приходится идти на изменение ее структуры. Для этой цели обычно используется введение в систему регулирования так называемых корректирующих средств, которые должны изменить динамику всей системы в нужном направлении. К корректирующим средствам относятся, в частности, корректирующие звенья, представляющие собой динамические звенья с определенными передаточными функциями. В тех случаях, когда корректирующие звенья используются именно для получения устойчивости системы регулирования или для повышения ее запаса устойчивости, они называются иногда демпфирующими или стабилизирующими звеньями. При этом имеется в виду, что звенья демпфируют колебания, которые возникают в системе регулирования. Термин «корректирующие звенья» является более широким и используется для звеньев, которые вводятся в систему для изменения статических и динамических свойств с различными целями. Получение требуемого быстродействия обычно обеспечивается при проектировании системы регулирования посредством выбора соответствующих элементов цепи регулирования (исполнительных органов, усилителей, серводвигателей и т. п.). Однако возможно улучшение быстродействия системы посредством использования корректирующих средств. До сих пор поведение систем автоматического регулирования исследовалось при определенных, заданных во времени задающих и возмущающих воздействиях (ступенчатая функция, импульсная функция, гармоническое воздействие и т. д.) Однако во многих случаях характер воздействия бывает таким, что его нельзя считать определенной функцией времени. Оно может принимать с течением времени самые разнообразные случайные значения. В таких случаях можем оценить только вероятность появления той или иной формы воздействия в тот или иной момент времени. Это происходит не потому, что оно неизвестно заранее, а потому, что сама природа реального задающего или возмущающего воздействия такова, что величина его в каждый момент времени, и процесс его изменения с течением времени, зависят от множества разнообразных величин, которые случайным образом могут комбинироваться друг с другом, появляться одновременно, или с любым сдвигом во времени и т.д. Следящие системы – это системы, на вход которых попадают вместе с полезным сигналом, помехи. Например, в радиолокационной системе сопровождения отраженный от цели сигнал содержит в себе помехи в виде многочисленных флуктуации, происходящих от вибраций и поворотов цели, замирания сигнала и т. п. Аналогичные помехи случайной природы имеют место в других автоматических устройствах. В следящих системах не только возмущающие воздействия и помехи являются случайными, но и сам полезный сигнал, который должен воспроизводиться (задающее воздействие), как правило, носит случайный характер. Система автоматического регулирования, которая содержит хотя бы одно звено, описываемое нелинейным уравнением, называется нелинейной. Перечислим виды нелинейных звеньев: 1) звено релейного типа; 2) звено с кусочно-линейной характеристикой; 3) звено с криволинейной характеристикой любого очертания; 4) звено, уравнение которого содержит произведение переменных, их производных и другие их комбинации; 5) нелинейное звено с запаздыванием; 6) нелинейное импульсное звено; 7) логическое звено; 8) звенья, описываемые кусочно-линейными дифференциальными уравнениями, в том числе переменная структура. Различают статические и динамические нелинейности. Первые представляются в виде нелинейных статических характеристик, а вторые – в виде нелинейных дифференциальных уравнений. Общий метод составления уравнений для нелинейных систем состоит, в следующем. Сначала, производится линеаризация уравнений всех звеньев системы, для которых это допустимо, кроме существенно нелинейных звеньев (чаще всего одного-двух). Затем составляются уравнения этих последних звеньев со всеми допустимыми упрощениями их характеристик. В результате получается система обыкновенных линейных уравнений, к которым добавляется одно-два (иногда более) нелинейных. В соответствии с этим, обобщенную структурную схему любой нелинейной системы автоматического регулирования в случае одного нелинейного звена, можно представить в виде, где линейная часть может иметь структуру любой сложности (с обратными связями и т п.). В случае двух нелинейных звеньев могут быть разные комбинации, в зависимости от того, в какие цепи системы они входят. Часто при исследовании нелинейных систем автоматического регулирования удается выделить нелинейность так, чтобы она описывалась непосредственно зависимостью между выходной и входной величинами и может иметь любую форму (релейного типа, кусочно-линейного или криволинейного). Но иногда, не удается этого сделать и приходится исследовать нелинейные дифференциальные зависимости. Процессы в нелинейных системах автоматического регулирования имеют целый ряд весьма существенных особенностей, которые не встречаются в линейных системах. Благодаря этим существенным особенностям, даже вопрос об устойчивости системы становится здесь более сложным. Кроме структуры системы и значений ее параметров для устойчивости того или иного установившегося процесса имеют значение здесь, в отличие от линейных систем, также и начальные условия. Возможен новый вид установившегося процесса – автоколебания, т. е. устойчивые собственные колебания с постоянной амплитудой при отсутствии внешних колебательных воздействий. Когда в системе возникают автоколебания, то установившееся состояние, соответствующее постоянному значению регулируемой величины, часто становится невозможным. Следовательно, в общем случае на плоскости параметров системы могут быть не два вида областей (устойчивости и неустойчивости), как в линейных системах, а больше: 1) область устойчивости равновесного состояния с постоянным значением регулируемой величины; 2) область устойчивых автоколебаний; 3) область неустойчивости системы; 3) области, соответствующие другим, более сложным случаям. Если процессы в системе имеют вышеуказанный, то равновесное состояние неустойчиво. В том случае, когда колебания в переходных процессах стремятся к одной и той же амплитуде и к одной и той же частоте, система будет обладать устойчивыми автоколебаниями с амплитудой а. Разрабатываемая система должна удовлетворять следующим требованиям: 1. интерфейс пользователя должен быть прост в обращении, и представлять собой диалоговую многоуровневую систему в виде вопрос-ответ; 2. программная оболочка должна обеспечивать выполнение следующих функций: • доступ к текстовым файлам, содержащих справочные материалы; • графическое отображение структурных схем и формул исследуемой системы; • выполнение программ, реализующих различные методы исследования нелинейных систем; • вывод результатов расчетов в виде графиков и таблиц; 3. система должна быть открытой для дополнения ее другими методами расчета и видами представления результатов эксперимента. С учетом изложенных требований необходимо выбрать инструментальные средства, которые позволят решить поставленную задачу. Предполагается функционирование разрабатываемой системы под управлением MS-DOS. Подготовка графических файлов требует наличие графического редактора, как правило, работающего в среде WINDOWS, как, например, редактор PAINT BRUSH. Для создания текстовых файлов справочников и исходных текстов программ можно использовать любой редактор, работающий в MS-DOS, например: EDIT или MULTY EDIT. Для разработки программного обеспечения удобно использовать язык высокого уровня PASCAL, так как он имеет средства для графического режима отображения информации и средства для быстрого построения оболочек TURBO-VISION. Для демонстрации графических файлов необходимо использовать средства визуализации их типа VIEWER. Конфигурация инструментальных средств для решения поставленной задачи приведена на рисунках. Всю работу над дипломным проектом разделили на пять основных этапов. 1 этап. Разработка математической модели и структурных схем, исследуемых объектов. 2 этап. Исследование объектов аналитическими методами. 3 этап. Разработка алгоритмического программного обеспечения АИС. 4 этап. Исследование объектов методом математического машинного моделирования на ПЭВМ. 5 этап. Сравнение результатов математического и машинного моделирования и подтверждение эффективности разработанного АИС. На первом этапе разрабатываются как подробные математические модели и структурные схемы, в частности, электромеханического привода, так и частичные случаи, например: • отсутствие обратной связи по скорости: • отсутствие релейного усилителя; • отсутствие инерционности цепи якоря электропривода; • управление двигателя по цепи обмотки возбуждения и управления двигателем по цепи якоря. На втором этапе аналитическими методами (алгебраическими и частотными) исследуются устойчивость системы и определяются возможности автоколебаний в системе и их параметры. На третьем этапе разрабатывается алгоритмическое и программное обеспечение АИС с использованием выше перечисленных инструментальных средств операционной системы ПЭВМ. На четвертом и пятом этапах проверяется эффективность разрабатываемой ЭВМ путем сравнения результатов, полученных при аналитическом и машинном исследованиях. 1. Математическая модель следящей системы нелинейный следящий автоматизированный Структурная схема электромеханической следящей системы на базе электропривода постоянного тока приведена на рис 1.1.
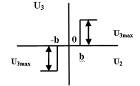
Рис. 1.1 На схеме обозначены: V1 и V2 – углы поворота командной и исполнительной оси; V1=V1-V2 – рассогласование (ошибка); ЧЭ – чувствительный элемент (датчик угла рассогласования); У – усилитель и его статическая характеристика; РУ – релейный усилитель; Д – двигатель; Р – редуктор; ТГ – тахогенератор; РМ – рабочий механизм (объект управления); Статическая характеристика релейного усилителя показана на рис. 1.2
Рис. 1.2 По данной структурной схеме составим дифференциальные уравнения звеньев системы. 1. Уравнение чувствительного элемента U1=K1V, (1.1) V=V1-V2, Где U1 – напряжение на выходе чувствительного элемента. 2. Уравнение линейного усилителя в операторной форме. (T1p+)U2=K2U, (1.2) U=U1-UТГ, Где U2 – напряжение на выходе усилителя, UТГ – напряжение тахогенератора,
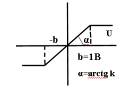
Статическая характеристика усилителя с учетом насыщения представлена на рис 1.3.
Рис. 1.3 3. Уравнение релейного усилителя записывается в следующем виде: U3=F(U2) (1.3), где U3 – напряжение на выходе усилителя (У); F(U2) – нелинейная функция, заданная статической характеристикой (см. рис. 1.2). 4. Уравнение исполнительного двигателя. Составим обобщенное дифференциальное уравнение движения постоянного тока, управляемого по цепям якоря обмотки возбуждения. За входные величины принять напряжение цепи якоря UЯ и обмотки возбуждения UВ и момент нагрузки на валу двигателя MН=МН(t), за выходную – угловую скорость якоря двигателя W. Насыщением магнитных цепей и реакцией якоря можно пренебречь. Двигатель работает в системе стабилизации частоты вращения. Составим уравнение равновесия напряжения:
и цепи якоря
а также уравнение равновесия моментов
Индексами «В» и «Я» отмечены параметры – индуктивность L, активное сопротивление R и переменные напряжения U, ток i возбуждения и якоря. Электромагнитный момент двигателя М и ЭДС якоря l имеют вид:
где dE, dM – постоянные коэффициенты; MH, J – момент нагрузки и момент инерции, приведенные к валу двигателя. Уравнения цепи якоря и уравнения равновесия моментов (1.7) и (1.8) – нелинейные, так как в них входят произведения переменных величин iЯ, iB и iBW.
Линеаризуем выражения для M и l разложением их в ряд Тейлора с учетом лишь линейных составляющих ряда. В результате получим соотношения для малых приращений: ∆ ∆λ= Здесь и далее верхним индексом «0» обозначаются установившиеся значения переменных, относительно которых изменяются их приращения. После подстановки ∆M и ∆λ в уравнение цепи якоря (1.5) и уравнение равновесия моментов (1.6) получим уравнение в малых приращениях (знак приращения ∆ отбросим).
Найдем из выше
написанного уравнения (1.7) ток Подставим его в уравнение (1.11) и после преобразования получим
где
 , ,  , ,
Определим коэффициенты В режиме короткого
замыкания (Ω = 0) при
где
Тогда из уравнения цепи якоря получим
С другой стороны из уравнения
Получим следующее выражение уравнения для пускового момента
Подставив
где
Далее из обобщенного дифференциального уравнения двигателя постоянного тока (1.14) получим частотные уравнения для следующих случаев: 1)
управление
двигателем по цепи обмотки возбуждения, когда 2)
то же, но при 3)
управление
двигателем по цепи якоря, когда 4)
то же, но при Рассмотрим эти случаи: 1)
В этом случае
приращение, ∆ уравнение движения принимает вид:
2)
Если
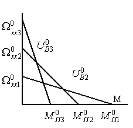
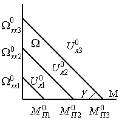
Коэффициенты Механические характеристики при этом имеют вид, показанный на рис. 1.4. a)
Рис. 1.4 Из этого видно, что
коэффициент наклона механических характеристик γ=const при Дифференциальное
уравнение движения и передаточная функция двигателя с независимым возбуждением,
управляемого по цепи якоря относительно угла поворота вала λ при
Передаточные функции двигателя постоянного тока с независимым возбуждением выражены в уравнении
Коэффициенты уравнений (1.15) и (1.16) определены в формуле (1.14). Механические характеристики при этом имеют вид как показано на рисунке (1.3). 3)
В этом случае
приращение ∆
4)
Если
а коэффициенты уравнений принимают следующий вид:
то цепи якоря, если пренебречь электромагнитными процессами цепи якоря, имеют вид: |
|
|||||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, курсовые работы, реферат, доклады, рефераты, рефераты скачать, рефераты на тему, сочинения, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||


 ,
, ,
, 
 ,
, 
 (1.14)
(1.14) ;
;  ;
; ;
; ; ;
; ; 
 ;
; ;
;
 ,
,  ,
, ,
,