|
Реферат: Система частотной автоподстройкиРеферат: Система частотной автоподстройкиМИНИСТЕРСТВО ОБРАЗОВАНИЯ РФ УРАЛЬСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ КАФЕДРА РАДИОТЕХНИЧЕСКИХ СИСТЕМ Система частотной автоподстройки (ЧАП) Пояснительная записка к курсовой работе по курсу "Теория управления и радиоавтоматика" Студент Гарюн В.И. Группа Р - 404А Преподаватель Маевская Е.А. 2008 Задание на курсовую работу 1. Тип системы - ЧАП. 2. Порядок астатизма - I. 3. Постоянная времени Т, сек. - 0,4сек. 4. Максимальное воздействие: 4.1. по скорости - 5*104сек-2; 4.2. по ускорению - 800Гц (1/с2). 5.
Отношение сигнал - шум 6. Граница апертуры Ха - 5×103 Гц. 7. Перехватывающий режим - 5*104 Гц/сек. 8. Форма сигнала - непрерывный. 9. Вид передаточной функции системы в разомкнутом состоянии: 10.
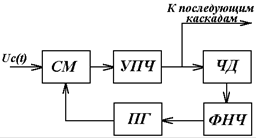
Рассчитать: 1. Номинальное значение петлевого усиления (добротности) Кпо из условий: 1.1. Динамическая ошибка в стационарном режиме не превышает 5% полуапертуры (полиномиальное воздействие); 1.2. Амплитуда ошибки в стационарном режиме при действии эквивалентной синусоиды с заданными максимальными значениями скорости и ускорения воздействия не превышает указанных выше значений; 1.3. Максимальное значение ошибки в переходном режиме при скачке скорости не превышает 50% полуапертуры. 2. Параметры сглаживающих цепей из условий: 2.1. Запас устойчивости по фазе не меньше 30°; 2.2. С. К.О. ошибки слежения, вызванной действием помехи с заданным q2макс, не превышает 20% полуапертуры. Содержание Задание на курсовую работу Расчет основных параметров системы Выводы Введение Примеры использования. Системы частотной автоподстройки (ЧАП) применяются в радиоприёмных устройствах для поддержания постоянной промежуточной частоты сигнала, используются для стабилизации частоты генерируемых колебаний, применяются в качестве узкополосных перестраиваемых по частоте фильтров и в качестве демодуляторов частотно-модулированных колебаний с обратной связью по частоте. Упрощенная функциональная схема супергетеродинного приёмника, в котором для стабилизации промежуточной частоты сигнала используется система ЧАП, показана на рис.1. В этом приёмнике входной сигнал uc (t) преобразуется в смесителе (СМ) на промежуточную частоту, усиливается усилителем промежуточной частоты (УПЧ) и поступает на следующие каскады приёмника (детектор, УНЧ).
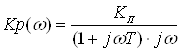
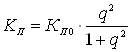
Рис.1. При отсутствии системы автоподстройки взаимная нестабильность частот входного сигнала и гетеродина может приводить к уходу промежуточной частоты сигнала за пределы полосы пропускания УПЧ и нарушению нормальной работы приёмника. Система ЧАП, включаемая в состав приёмника для устранения этого явления, работает следующим образом. Напряжение с выхода УПЧ подаётся на устройство, называемое частотным дискриминатором (ЧД). При появлении отклонения Dw промежуточной частоты сигнала от её номинального значения, которое совпадает с центральной частотой УПЧ, на выходе дискриминатора возникает напряжение, зависящее от величины и знака отклонения Dw. Выходное напряжение дискриминатора, пройдя через фильтр нижних частот (ФНЧ), поступает на подстраиваемый генератор (ПГ) и изменяет его частоту, а следовательно, и промежуточную частоту сигнала так, что исходное рассогласование Dw уменьшается. В результате работы системы ЧАП промежуточная частота сигнала поддерживается близкой к центральной частоте УПЧ. Это позволяет существенно уменьшить влияние взаимной нестабильности частот передатчика и гетеродина, сузить полосу УПЧ и повысить качество приёма. Система ЧАП применяются также в качестве автоматически перестраиваемых по частоте (следящих) фильтров, осуществляющих частотную селекцию сигнала. Точка съёма отфильтрованного напряжения при этом выбирается в зависимости от того, требуется ли сохранить в процессе фильтрации неизменной амплитуду сигнала или такое требование не предъявляется. Если полезная информация заключена в амплитуде сигнала и её необходимо сохранить, то отфильтрованное напряжение снимается с выхода УПЧ. Полоса пропускания фильтра, построенного с использованием системы ЧАП, равна при этом полосе пропускания УПЧ. При изменении центральной частоты входного сигнала в результате работы системы ЧАП изменяется частота гетеродина и фильтр автоматически настраивается на новое значение частоты сигнала [1]. Расчет основных параметров системы 1. Сначала рассчитаем значение петлевого коэффициента усиления исходя из трёх ограничений. Два из них относятся к стационарному режиму. Первое условие требует, чтобы динамическая ошибка в стационарном режиме не превышала 5% от заданного значения полуапертуры. 1.1.
Второе условие требует выбора петлевого усиления таким образом, чтобы амплитуда ошибки в стационарном режиме не превышала 5% от заданного значения полуапертуры. 1.2 Определим амплитуду эквивалентного динамического воздействия LМ и его частоту W.
Амплитуда ошибки слежения в стационарном режиме может быть найдена из выражения
Третьим условием является то, что максимальное значение ошибки в переходном режиме при скачке скорости не превышает 50% полуапертуры. 1.3.
Максимальное значение ошибки слежения при ступенчатом изменении скорости параметра l (t) приближённо равно (при КП0×Т>10) [1]:
Найдём из этого выражения коэффициент передачи КП0. Преобразованием вышеизложенного выражения получаем квадратичное уравнение для вычисления КП0.
тогда выражение примет вид: частотная автоподстройка радиоприемное устройство
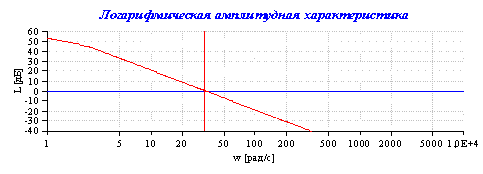
КПО = 12,552 =157,5 1/с. Исходя из вышеперечисленных условий берём коэффициент усиления не корректированной системы равным КП0 = 450 1/с. Выбор корректирующих цепейДля начала построим не скорректированные характеристики и посмотрим, что не удовлетворяет требованиям для системы.
ЛАЧХ
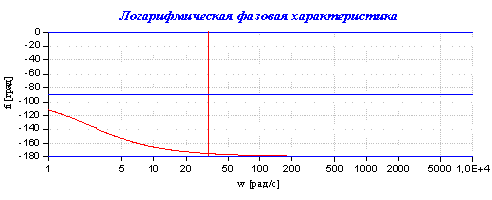
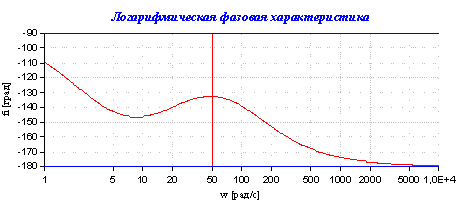
ЛФЧХ
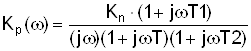
По построенным характеристикам определили, что система не удовлетворяет требованиям задания (т.е. запас по фазе в районе частоты среза равен 3°, вместо 30° и наклон ЛАХ в районе частоты среза равен - 40 дБ/дек) и требует коррекции. Передаточная функция скорректированной системы будет иметь следующий вид:
Для построения логарифмические амплитудно-частотных и фазо-частотных
характеристик системы воспользуемся программой, разработанной на кафедре РЭС и методом
подбора получим необходимую коррекцию. Рассчитаем параметры корректирующего звена.
Т=0,4с, зададим φзап=45о, тогда βс=π/2
- φзап= π/4 и из формулы Т=
Далее по формулам Т1=
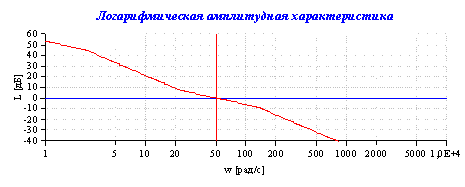
Построим ЛАЧХ данной системы. ЛАЧХ
ЛФЧХ
jзап»47,40 и ЛАХ в районе частоты среза имеет наклон - 20дБ/дек, что удовлетворяет техническим требованиям. Проверим, удовлетворяет ли полученное С. К.О. заданному условию, т.е. не превышает 20% полуапертуры.
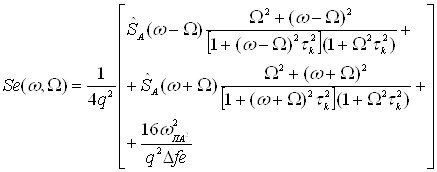
С. К.О. расч= в нашем случае Se представляет зависимость от w и W.
где,
W - расстройка частоты сигнала относительно переходной частоты частотного дискриминатора, tк - постоянная времени каждого из контуров в частотном дискриминаторе,
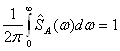
В связи с тем, что зависимость спектральной плотности эквивалентной помехи на выходе частотного дискриминатора от частоты в общем случае имеет неравномерный характер, то для расчёта дисперсии ошибки следует пользоваться равенством:
Приближённое выражение может быть использовано, как правило, при относительно больших ошибках слежения W или небольших отношениях сигнал/помеха q2, что соответствует нашей задаче. В последнем случае можно использовать значение эквивалентной спектральной плотности на нулевой частоте:
Это равенство можно использовать в приближённом выражении для расчёта дисперсии ошибки подстройки частоты системой ЧАП. При этом параметр спектральной плотности W полагается фиксированным, равным значению динамической ошибки слежения. DFэ
=
С0 = КП; С1 = КП Т1; d0 = KП; d1 = 1+ КП Т1; d2 = T+T2
Исходя из выше приведенных формул С. К.О. расч » 0,738 Из полученных значений видно, что данное условие соблюдается. Выводы В данной работе была проведена коррекция системы ЧАП первого порядка астатизма, с условием выполнения требований изложенных в техническом задании. Исходя из условий обеспечения требуемых показателей точности
слежения в стационарном режиме, был взят Применив параллельную коррекцию в виде пропорционально-интегрирующего звена, рассчитанную по методике из [2] с использованием программ [4] и [5], были получены запас по фазе 47,4° и наклон ЛАЧХ в районе частоты среза - 20дБ/дек, т.е. была получена устойчивая система. Расчет эквивалентной шумовой полосы замкнутой системы проводился из литературы [2]. Через расчет дисперсии ошибки слежения была найдена СКО ошибки слежения, которая удовлетворяет требованиям, т.е. меньше 20% полуапертуры. Библиографический список 1. Первачёв С.В. Радиоавтоматика: Учебник для вузов. - М. Радио и связь, 1982. 2. Астрецов Д.В. Системы радиоавтоматики. Методические указания к выполнению курсовой работы по курсу "Теория управления и радиоавтоматика" Екатеринбург. Издательство УГТУ, 1997, 36 с. 3. Гольденберг Цифровые фильтры 4. Программа, подготовленная на кафедре РТС, под руководством Самусевич Г. А. 5. Профессиональный пакет для математических вычислений MathCad 7 Professional любезно предоставленный компанией MathSoft. |
|||||||||||||||||||
 |
||
| НОВОСТИ |  |
|
|
||
| ВХОД | |
|
|
|||||
Рефераты бесплатно, реферат бесплатно, курсовые работы, реферат, доклады, рефераты, рефераты скачать, рефераты на тему, сочинения, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||

 ,
,  ,
,  , Lм=
31,25×105 1/с.
, Lм=
31,25×105 1/с. , W=
0.016 1/с.
, W=
0.016 1/с. , т.к. у нас Lм >> XД1, то
, т.к. у нас Lм >> XД1, то , тогда отсюда находим КП0.
, тогда отсюда находим КП0. ,
,  .
.
 ,
,  ,
,
 , найдём wср
, найдём wср и Т2=
и Т2= .
.
 ,
, ,
, ,
, .
. .
. = 0,2
= 0,2 =
=