|
Курсовая работа: Обеспечение помехопостановки и помехозащиты технических устройствпомехозащита импульсный помеха сигнал
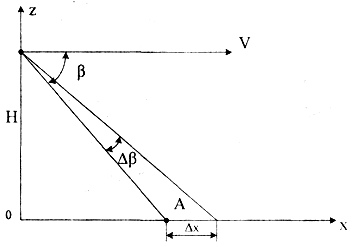
Для любого угла места β частота Доплера:
Определим угол Δβ, соответствующий полосе пропускания доплеровского фильтра ДГ и пропорциональный ширине линии изодопы:
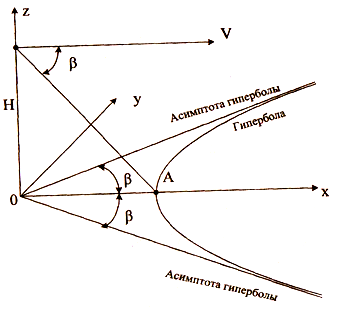
Построим изодопу для выбранного угла β в пространстве, в координатах х,у,z (рис.16).
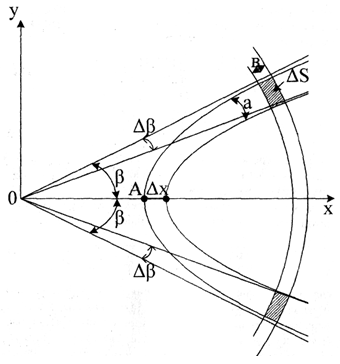
Расчеты показывают, что для гиперболы, построенной из точки А (рис. 15) в плоскости х,у, лежащей на земной поверхности, углы асимптот всегда равны углу β. На рис. 17 приведенная ранее изодопа представлена в плоскости х,у.
Величина Δх (рис. 15) определяет ширину линии изодопы на земной поверхности, пропорциональной величине Δf. Если по ширине изодопы провести асимптоты, то угол между ними составит величину Δβ, такую же как на рис. 15. Следовательно, ширина изодопы при ее продолжении увеличивается пропорционально величине Δβ. Тогда площадь участка ΔS, определяемого пересечением изодопы и кольца дальности ΔS=ab, где a ─ сторона, определяемая наклонной дальностью D и величиной Δβ и b ─ сторона, которая пропорциональна длительности τи. На основании изложенного площадь одного участка, соответствующая первому кольцу дальности ΔS, определяется:
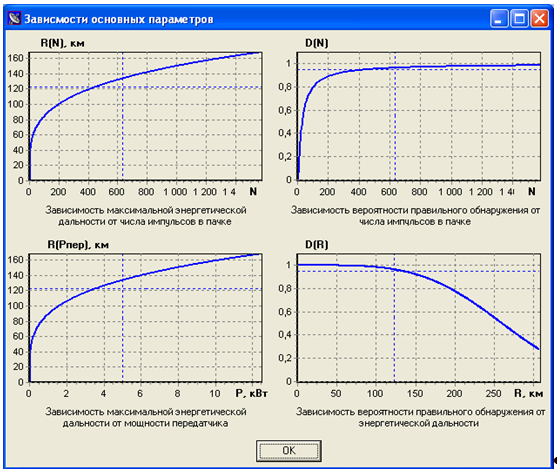
· в закладке «Параметры 1» рис.18 укажем «Мощность передатчика, кВт» - 5, «Коэффициент усиления антенны» - 10000, «Энергетическая дальность, км» - 123, «Разрешение по дальности, м» - 200, «Вероятность правильного обнаружения» - 0,95, «Вероятность ложной тревоги» - 10-6, «Потери при обработке, дБ» - 3. · в закладке «Параметры 2» рис. 19 укажем для азимутальной плоскости: «Максимальный угол сканирования, гр.» - 70, «Минимальный угол сканирования, гр.» - (-70), «Разрешение, гр» - 5; для угломестной плоскости: «Максимальный угол сканирования, гр.» - 20, «Минимальный угол сканирования, гр.» - (-20), «Разрешение, гр» - 5; «Время обзора сектора сканирования» - 1,28 с. Расчет числа импульсов в пачке зондирующего сигнала вести, исходя из времени обзора сектора сканирования. Значения, указанные в закладках «Параметры 1» и «Параметры 2» были выбраны согласно ТЗ и характеристикам БРЛС "БАРС" см. приложение. Теперь программа выполнит расчет параметров РЛС, согласно принятым параметрам, рис. 20. В программной среде «Стрела» имеется возможность отображения некоторых результатов в виде зависимостей, которые представлены на рис. 21.
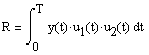
Как видно из рис. 21: · увеличение числа импульсов в пачке приводит к большему значению энергетической дальности, что можно объяснить непосредственной связью числа импульсов в пачке N с коэффициентом передачи сигнала kс(kс= N), а последнее связано с энергетической дальностью R, причем чем больше kс, тем больше R [5]. · увеличение N приводит к повышению вероятности правильного обнаружения D, что вполне удовлетворяет теории [5]. · дальность связана с мощностью передатчика основным уравнением дальности радиолокации (как корень четвертой степени), согласно которому увеличение мощности приводит к возрастанию энергетической дальности. · увеличение энергетической дальности приводит к уменьшению значения правильного обнаружения, связанно данное явление может быть с тем, что на больших дальностях хуже разрешение целей, больше сказывается влияние среды на распространяющуюся волну и многие другие факторы. Как ранее отмечалось, требуется обеспечить защиту БРЛС от пассивных помех в виде подстилающей поверхности. Способы оптимальной обработки сигналов в импульсно-доплеровской РЛС В режиме ВЧП обнаружение сигналов от целей ведется на фоне шума приемника. Отраженный сигнал от цели представляет пачку радиоимпульсов с неизвестной доплеровской частотой, которая подвергается когерентной обработке. Чтобы учесть доплеровский сдвиг частоты, широко используются гребенчатые фильтры, представляющие набор узкополосных фильтров, осуществляющих когерентное накопление. Ожидаемую пачку импульсов (копию сигнала) u(t) можно представить в виде произведения двух колебаний: последовательности видеоимпульсов u1(t) и высокочастотного колебания u2(t) несущей частоты f0, модулированного огибающей пачки, т.е. u(t)= u1(t) u2(t), которое соответствует ожидаемому сигналу. Если аддитивную смесь сигнала с шумом на входе приемника обозначить y(t), то отклик согласованного фильтра даёт на выходе корреляционный интеграл R:
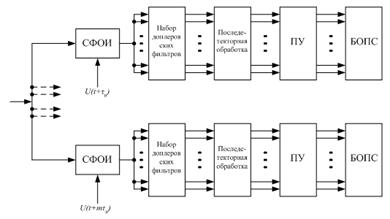
Откуда вытекает следующий оптимальный алгоритм обработки пачки радиоимпульсов: принимаемая реализация колебаний y(t) стробируется. При этом получается колебание u(t)=u1(t)u2(t). Стробирование необходимо осуществлять в соответствии со временем запаздывания сигналов. При неизвестном времени запаздывания необходима многоканальная схема. Каждый временной канал относительно соседнего стробируется импульсной последовательностью, задержанной на длительность одного импульса пачки τи. Тогда число временных каналов m в одном периоде повторения Т определяется m=T/τи и соответствует величине скважности. В каждом канале дальности необходимо осуществить накопление сигналов пачки, т.е. вычислить интеграл. Интегрирование осуществляется узкополосным фильтром. При неизвестной доплеровской частоте цели в каждом стробируемом канале число доплеровских фильтров должно быть таково, чтобы перекрывать весь диапазон доплеровских частот, который в импульсных системах. благодаря периодичности спектра, можно принять равным Fп. Таким образом, согласованный фильтр обработки имеет структуру, представленную на рис. 22.
Согласованные фильтры одиночного радиоимпульса (СФОИ) стробируются по дальности с числом временных сигналов m. В каждом канале ставятся узкополосные доплеровские фильтры, перекрывающие доплеровский диапазон целей, где производится накопление сигнала. Детектирование огибающей сигнала осуществляется в блоке последетекторной обработки, на выходе которого в пороговом устройстве (ПУ) происходит сравнение с пороговым уровнем с целью обнаружения сигнала. В блоке определения параметра сигнала (БОПС) определяются параметры цели, такие как скорость, дальность и т.д. При обнаружении цели определяется доплеровская частота цели по номеру доплеровского фильтра и рассчитывается скорость цели:
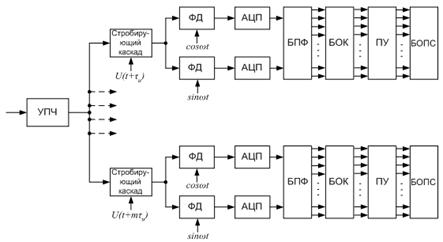
Практически вместо СФОИ лучше использовать усилитель промежуточной частоты (УПЧ), параметры которого согласованны с параметрами сигнала, а узкополосные доплеровские фильтры выполнить в виде блока цифровой обработки, включающего память на всю пачку и обработку на основе быстрого преобразования Фурье (БПФ). Тогда согласованный фильтр имеет структуру, представленную на рис. 23.
Стробирование по дальности выполняется в стробирующих каскадах, подключенных к выходу УПЧ, на которые подаются временные стробы длительностью τи. Количество стробирующих каскадов равно m. Обработка по частоте Доплера в каждом временном канале производится на видеочастоте, в двух квадратурных каналах, где с помощью фазовых детекторов (ФД) полезная информация из фазы переходит в амплитуду. Для цифровой обработки необходимо информацию с выхода ФД преобразовать в цифровые коды, что выполняется с помощью аналого-цифровых преобразователей (АЦП). Блок, обозначенный как БПФ, включает память на всю пачку отраженных импульсов и обработку в виде БПФ. На выходе БПФ образуется n частотных каналов, где n - число импульсов в пачке, отраженной от цели. Полоса пропускания каждого доплеровского фильтра в этом случае будет:
В БПФ производится когерентное накопление сигнала y(t). Объединение квадратурных каналов производится в блоке объединения квадратур (БОК), причем объединение производится для каждого частотного канала. Обнаружение полезного сигнала происходит на выходах многоканального (n каналов) порогового устройства (ПУ). Дальнейшая обработка в виде фиксации обнаружения и измерения параметров цели производится в блоке определения параметров сигнала (БОПС). Величина порогового сигнала q на выходе когерентного накопителя:
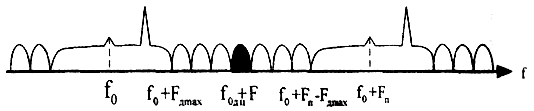
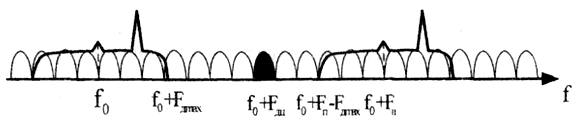
Где qвх – отношение напряжения полезного сигнала (uсвх) к среднеквадратическому значению шума (σшвх) на входе устройства обработки. Структура фильтра, представленного на рис. 23, реально в цифровом виде выполняется на одном АЦП и спецпроцессоре с одним БПФ. Многоканальность по времени реализуется за счет разбиения по временным тактам работы АЦП и БПФ. На рис. 24 приведены спектры соседних гармоник, отраженных от пассивных помех, от цели и с учетом частотной характеристики согласованного фильтра, выполненного в виде многоканального доплеровского фильтра, показанного на рис. 22 для режима ВЧП.
Аналогичный спектр на рис. 25 представлен при выполнении многоканального доплеровского фильтра в виде БПФ, структурная схема которого показана на рис. 23.
Особенность обработки, показанной на рис. 24, состоит в том, что доплеровские фильтры расположены в зоне спектра, свободного от пассивной помехи. При изменении скорости носителя РЛС меняется положение точек f0±Fдmах, что приводит к изменению зоны спектра, свободного от пассивных помех. В этом случае для перекрытия всей зоны спектра, где может находиться полезный сигнал, следует производить адаптивную привязку начала гребенки доплеровских фильтров к скорости носителя РЛС (к точке f0±Fдmах). В случае использования БПФ (рис. 25) по ширине спектра пассивных помех Fдmах рассчитывают количество частотных каналов БПФ, в которых находится помеха, и эти каналы в обнаружении полезного сигнала не участвуют. Из всего анализа можно сделать вывод, что схема рис. 23 хоть и сложнее схемы рис. 22, но обеспечивает лучшие результаты, так как учитывает изменение скорости носителя РЛС (для избавления от пассивной помехи выберу эту схему). В техническом задании также указана активная помеха (АП) – уводящая по скорости. Такой тип помех используется для обеспечения срыва автосопровождения цели по координатам (дальности, скорости). В отличие от помех типа ложная цель, уводящие помехи динамически изменяют свои параметры, т.е. принимая сигнал от РЛС, они преднамеренно изменяют в нем какой-либо параметр (вносят дополнительную задержку, изменяют фазу и др.), после чего переизлучают его в направлении станции, тем самым, обеспечивается автозахват ложной цели и ее сопровождение. Бороться с такой помехой можно, с помощью следующего алгоритма: скоростно-пороговый алгоритм заключается в следующем:
Если равенство выполняется, то параметры дальности R и скорости V согласованы и идет сопровождение цели. Если не выполняется, то это уводящая помеха. Иначе говоря, зная, что скорость есть первая производная от дальности, сравнивая оценку с вычисленной скоростью можно сделать вывод о наличии или отсутствии помехи.
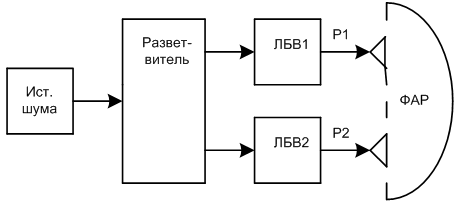
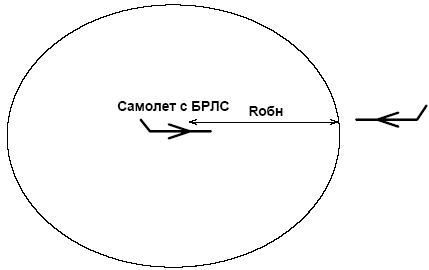
Если ΔV=10км/ч – это ложная цель и нужно снять ее с сопровождения. Реализация данного метода будет показана на структурной схеме БРЛС ниже. Расчет параметров помехопостановщика Общей задачей применения активной помехи, в нашем случае является сокрытие объекта в некоторой области пространства, уменьшение зоны видимости подавляемой РЛС, уменьшении вероятности правильного обнаружения подавляемой РЛС. Существует несколько способов реализации такой помехи: - усиление исходного шумового сигнала; - формирование активной помехи из самого полезного сигнала. Остановимся на рассмотрении второго способа. При постановке активной помехи возможны две ситуации: - передатчик активных помех расположен непосредственно на прикрываемом объекте (самоприкрытие). - постановщик активных помех расположен в вынесенной точке пространства. Остановимся на рассмотрении первой ситуации. Наиболее перспективной схемой постановщика активных помех, является схема с применением фазированных антенных решёток (ФАР). ФАР позволяет сконцентрировать энергию в узком луче и направить его на подавляемые РЭС, за счёт фазирования удаётся довести мощность излучения до величины:
Выбранный вариант схемы представлен на Рис.26.
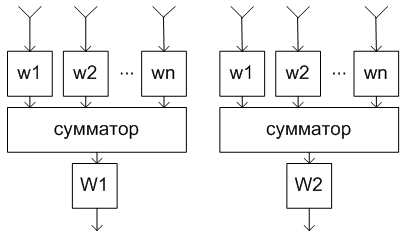
Мощность передатчика активных помех должна соответствовать приблизительно 10% от мощности передатчика подавляемой РЛС. Таким образом мощность передатчика активных помех будет составлять 500 Вт. Коэффициент усиления антенны передатчика активных помех будет равен 100. Необходимо иметь ввиду что частота на которой ставится активная помеха должна соответствовать частоте на которой работает РЛС. Иными словами спектр помехи должен соответствовать полосе пропускания приёмника РЛС, рассогласование этих параметров будет приводить к неэффективности такой помехи. Защита от активной помехи Несмотря на общую высокую эффективность применения активной шумовой помехи (АШП), существенный недостаток при использовании состоит в том, что их легко обнаружить. Это ставит в уязвимое положение ПАП, а также позволяет применить различные меры борьбы с помехами: - работа РЛС в короткий промежуток времени; - смена несущих частот (если РЛС многочастотная); - использование сложных сигналов; - использование длительного когерентного накопления. Но все эти вышеуказанные методы либо приводят к неудобству работы РЛС, либо к изначальному проектированию РЛС с возможностью таких режимов работы. Одним из перспективнейших методов борьбы с АШП является адаптивных антенных решёток. Оптимальную обработку сигналов в решётках можно рассматривать как задачу оптимальной фильтрации, основной целью которой является улучшение приёма или обнаружения полезного сигнала, когда наряду с ним присутствуют помехи. При этом полезный сигнал может иметь один или несколько неопределённых параметров (таких как пространственное положение его источника, энергия и начальная фаза сигнала), которые необходимо оценить. Поскольку любая многоэлементная антенная решётка может использоваться для осуществления пространственной фильтрации или, что то же самое угловой селекции, то первоначальный подход к решению проблемы сводился к получению требуемых ДН с нулями в направлении источников помех с помощью весового суммирования сигналов отдельных элементов решётки. При более общем подходе к проблеме обнаружения сигнала на форму ДН не накладывается каких-либо ограничений. Структура процессора для обработки сигналов решётки обусловлена выбранным критерием оптимальности и получается в результате математического решения рассматриваемой задачи. При это операция формирования ДН становится частью алгоритма оптимальной обработки сигналов, хотя такая операция и не была задана в самом начале. Полученное устройство обработки (процессор) будет настолько близко к оптимальному, насколько используемые математические модели соответствуют действительным условиям работы системы. При использовании большинства известных критериев эффективности оптимальные решения (оптимальные весовые векторы) тесно связаны между собой. Наиболее известным оптимальным решением для линейной антенной решётки с числом элементов n является n-мерный вектор комплексных весовых коэффициентов:
Где
R – комплексная корреляционная матрица помех,
размерности n*n, S – n-мерный вектор ожидаемого сигнала. Отсчёты смеси
сигнала и помехи, соответствующие каждому элементу антенной решётки, в формуле
взяты в некоторый момент времени Практическая реализация алгоритма связана с решением проблемы априорной неопределённости, которая заключается в отсутствии информации о корреляционной матрице помех R. Одним из методов решения данной проблемы является адаптация, представляющая собой процедуру настройки параметров антенной решётки на основе данных, последовательно извлекаемых из принимаемой смеси сигнала и помех. Важным этапом является выбор алгоритма адаптации, поскольку он непосредственно влияет как на скорость переходного процесса (сходимости), так и на сложность технической реализации системы в целом. Среди всего многообразия адаптивных алгоритмов наиболее распространёнными являются два класса: - алгоритмы, основанные на вычислении коэффициентов весового вектора антенной решётки путём непосредственного обращения заранее оцениваемой корреляционной матрицы (метод НОМ); - градиентные адаптивные алгоритмы, приводящие к устройствам обработки с корреляционными обратными связями (КОС). Первый класс алгоритмов теоретически обеспечивает самую высокую скорость переходных процессов адаптации, однако требует больших вычислительных затрат при больших размерностях корреляционной матрицы. Второй класс, несмотря на сравнительную простоту и высокую эффективность в установившемся режиме, имеет ряд недостатков, главным из которых является длительный переходной процесс адаптации, особенно в случае сильно коррелированных помех. Кроме того, системам КОС присуща нестабильность при изменении мощности помехи, а также при наличии мощного сигнала от цели. На
практике в целях упрощения аппаратурной реализации переходят к частичной
адаптации, когда весовой коэффициент
Алгоритм
НОМ представляет собой выражение
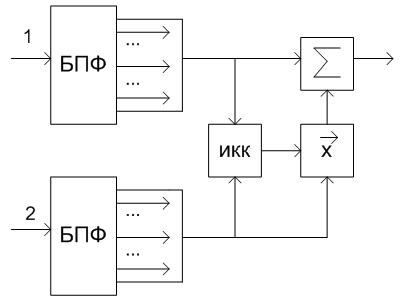
Где Y1,2 – отсчёты на выходе соответственно 1-го и 2-го пространственных каналов, m – число усреднений. Алгоритм ОМП предусматривает усреднение по совокупности независимых отсчётов помехи. Для случая импульсного сигнала с большой скважностью, когда отражённый сигнал находится в одном элементе разрешения по дальности, для усреднения используют отсчёты разных элементов разрешения по дальности. При большом количестве усредняемых отсчётов влиянием одного отсчёта полезного сигнала (сигнал находится в одном элементе разрешения) на оценку коэффициента корреляции помехи можно пренебречь. Структурная
схема компенсатора АШП для пары пространственных каналов приведена на Рис.28.
Кроме блоков БПФ и вычитающего сумматора на схеме показаны измеритель
коэффициента корреляции (ИКК) и комплексный перемножитель (
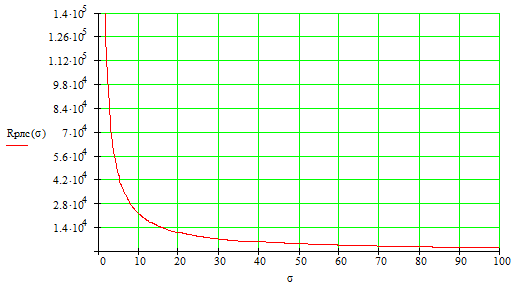
Расчет зон прикрытия помехами Покажем влияние ЭПР от подстилающей поверхности на дальность действия РЛС рис.29.
С увеличением ЭПР помехи дальность действия РЛС уменьшается связанно это с большим отражением в сторону РЛС, что может приводить, в свою очередь, к запиранию приемника. Для более наглядного отображения зон прикрытия активными помехами, приводится Рис.30:
Интерес представляет зависимость дальности действия РЛС от мощности передатчика, в условиях применения активных помех, её можно получить из формулы:
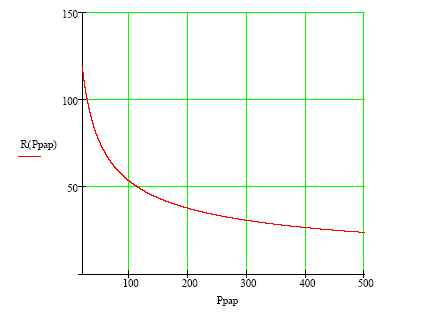
Так как цель осуществляет самоприкрытие, тои сигнал и помеха приходят по главному лучу. Зависимость максимальной дальности обнаружения от мощности постановщика помех имеет следующий вид:
Отсюда видно, что при остальных фиксированных параметрах энергетическая дальность БРЛС уменьшается существенно. В реальности же существует некая минимальная дальность, начиная с которой эффективность помехопостановки падает. Это происходит вследствие того что вместе с увеличением сигнала помехи на входе БРЛС, происходит увеличение и сигнала от цели, так как помехопостановщик и цель совмещены. Анализ эффективности применения комплекса помех и средств помехозащиты Эффективность подавления помехи компенсатором характеризуется коэффициентом подавления Kп=Рпвх/Рпвых. Вычисляя мощность помехи на выходе компенсатора, нетрудно показать, что коэффициент подавления в установившемся режиме равен: Кп=1/(1- Где
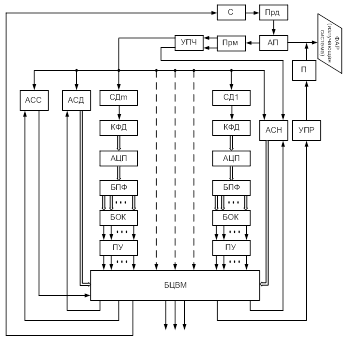
В нашей ситуации, ситуации самоприкрытия, эффективность помехи тем выше, чем больше расстояние от БРЛС до цели, и падает по мере его уменьшения. Оценка требований к аппаратно-программным ресурсам средств конфликтующих сторон Такого рода оценка позволяет сделать выводы о современных возможностях электроники и техники в целом, достичь на данном этапе желаемого результата. Наличие реальных ограничений физических возможностей летчика делает настоятельно необходимым разработку беспилотных боевых самолетов. Следует отметить, что в конечном счете использование беспилотных боевых самолетов имеет и явный экономический аспект, направленный на удешевление боевых действий. Положительный опыт применения беспилотного боевого самолета США RQ-1A «Предатор» (Хищник) при уничтожении группировок талибов в горах Афганистана показывает, что эта задача уже переведена в практическую плоскость. Необходимо, однако, подчеркнуть, что использование беспилотных боевых самолетов, особенно в воздушном бою, потребует разработки новых тактических приемов их использования с существенно более высоким уровнем информационного обеспечения, в рамках которого инвариантные к метеоусловиям БРЛС будут играть все возрастающую роль. Непрерывность поступления высокоточной информации является одним условием эффективного решения боевых задач. В связи с этим одним из важнейших свойств БРЛС является ее способность работать в любой (сложной) помеховой обстановке. Эта способность должна обеспечиваться: · разработкой комплексных систем анализа сигнально-помеховой обстановки; · созданием эффективных средств защиты от сигналоподобных и многоточечных помех; · использованием скрытных, в том числе и пассивных режимов работы; · комплексированием датчиков различной физической природы; · использованием многопозиционных систем и групповых действий; · разработкой эффективных средств защиты; использованием своих средств РЭБ в интересах помехозащиты. Что же касается помехопостановки, то здесь требуется разработка новых алгоритмов и более быстродействующих вычислительных устройств. Так же хорошо бы разработать алгоритмы, позволяющие отслеживать изменение ситуации в реальном времени. Таким образом, на устройства помехопостановки накладываются порой более жесткие требования по быстродействию, нежели к БРЛС, для которой это условие играет не малую роль. Подводя итог, можно сказать, что для улучшения возможностей противоборствующих сторон требуется освоение новых технологий и материалов, поиск эффективных математических решений. Выбор и технико-экономическое обоснование технологической базы для реализации проекта В связи с тем, что отечественная промышленность далеко отстает от зарубежной, а ряд радиоэлементов и деталей вообще не производится, всем разработчикам военной техники приходится использовать зарубежную базу. Такой подход сказывается на стоимости разработки, а самое главное трудно сказать, несмотря на всевозможные исследования и проверки, снабжена ли та или иная микросхема специальным чипом, который в случае необходимости приведет выходу из строя устройства. Для реализации проекта потребуется использование импортных микросхем (АЦП, ЦАП и др. вычислительные устройства). Экономическое совершенство БРЛС оценивается по критерию стоимости ее жизненного цикла (СЖЦ), который включает в себя: стоимость разработки, закупочную стоимость, стоимость эксплуатации, стоимость модернизации и снятия с эксплуатации. Многолетние статистические данные показывают, что затраты на эксплуатацию составляют более 50% СЖЦ, поэтому при снижении стоимости эксплуатации может быть получена значительная суммарная экономия. В свою очередь, стоимость технической эксплуатации БРЛС определяется: · стоимостью разработки и применения системы технической эксплуатации (СТЭ); · методами и техническими средствами контроля, диагностирования и управления техническим состоянием БРЛС в воздухе для обеспечения ее отказоустойчивости в течение времени применения по назначению и на земле, при техническом обслуживании и ремонте; · надежностью БРЛС, т.е. ее безотказностью, ремонтопригодностью, долговечностью и сохраняемостью; · организационно-штатной структурой инженерно-технического состава (ИТС) и стоимостью его обучения. Применяемая в настоящее время планово-предупредительная СТЭ бортового оборудования по существу является СТЭ по ресурсу. Она включает в себя мощные наземные средства контроля и диагностирования, с помощью которых ИТС проводит большое количество различных (затратных) профилактических работ (подготовку к полетам, периодические, регламентные работы и т.п.). Результаты контроля технического состояния при применении по назначению в воздухе не используются и расшифровываются лишь по необходимости при техническом обслуживании на земле. Все это приводит к снижению эффективности применения БРЛС, росту ошибок, допускаемых летным составом, а, главное, к непроизводительному расходу ресурса бортового оборудования на земле, который достигает 30...40%. Основные исходные данные для создания перспективной экономичной СТЭ БРЛС - набор рабочих режимов бортовых систем, наличие в них информационной, функциональной и структурной избыточностей, а также показатели безотказности программного обеспечения и аппаратуры. В авиационных бортовых системах в качестве сетевой магистрали давно служит шина, выполненная по стандарту MIL – STD – 1553B. Это детерминированная надежная шина передачи данных со скоростью 1 Мбит/с. Она используется для подключения датчиков и контроллеров реального времени к вычислительным модулям бортовой вычислительной системы. Ее массовость объясняется следующими факторами: · линейной архитектурой локальных сетей; · возможностями резервирования; · поддержкой как простых, так и интеллектуальных узлов; · высокой электрической защищенностью: · доступностью компонентов; · гарантированным детерминизмом в условиях реального времени. Несмотря на все привлекательные стороны шины MIL – STD – 1553B, которые способствовали ее широкой популярности, применение этой шины в более скоростных по обмену информацией военных системах сдерживается довольно низкой скоростью последовательной передачи данных - всего 1 Мбит/с. На замену MIL – STD – 1553B претендуют такие известные стандарты высокоско-ростной связи, как Fiber Distributed Data Interface (FDDI), Fiber Channel, ATM и др. Составление структурной схемы устройства и описание ее работы Структурная схема импульсно-доплеровской РЛС Структурная схема бортовой РЛС приведена на рис. 35 (так же имеется в графическом материале). На структурной схеме показано взаимодействие основных узлов импульсно-доплеровской РЛС. Режимы работы синхронизатора (С) задаются бортовой ЦВМ. Приемник с усилителем промежуточной частоты (УПЧ) имеет как минимум два идентичных канала: дальномерный и угломерный. С угломерного канала поступает информация об угловых координатах цели в режиме обзора и автосопровождения. Информация с дальномерного канала служит для обнаружения, измерения параметров цели в различных режимах. Основная обработка производится в согласованном фильтре, состоящем из m временных каналов, каждый из m каналов состоит из селектора дальности (СД), квадратурных фазовых детекторов (КФД), АЦП, БПФ, блока объединения квадратур (БОК) и порогового устройства (ПУ). Широкой линией показана обработка в двух квадратурных каналах. Выходы ПУ, число которых определяется числом отраженных импульсов в пачке n, подключены к БЦВМ, где в соответствии с заложенными алгоритмами решаются задачи обнаружения, измерения параметров цели. Системы автосопровождения по скорости (АСС), дальности (АСД), направлению (АСН) решают задачу сопровождения выбранной цели. Устройство управления (УПР) и привод (П) по информации с БЦВМ изменяют положение антенного устройства. Перевод системы на автоматическое сопровождение цели осуществляется после режима обзора и захвата цели на автосопровождение. Сканирование луча антенны можно осуществлять по строчному методу двумя циклами. Если четные и нечетные строки проходить лучом в противоположных направлениях, то частоту повторения от строки к строке можно менять с высокой на среднюю и наоборот. Циклы отличаются порядком изменения частоты повторения при переходе с четных на нечетные строки, так что за два цикла режимы ВЧП и СЧП используются для просмотра всего пространства, обеспечивая всеракурсное обнаружение целей.
Заключение В результате работы была проделана очень интересная работа, во-первых, были получены навыки построения БРЛС, во-вторых, ознакомились с основными проблема при их (БРЛС) построении и, в-третьих (наверное, самое главное), задача рассматривалась с разного ракурса. Т.е. первоначально делалось все необходимое для обеспечения нормальной работы БРЛС, затем, со стороны постановщика помехи, все (с учетом носителя) для срыва этой работы. Анализ тактических, экономических и технологических факторов, позволяет сформулировать целесообразные проектные решения. В концептуальном плане эти установки направлены на: · повышение боевой эффективности; · повышение экономичности разработки, эксплуатации и боевого применения БРЛС; · расширения ее информационных возможностей, в том числе и за счет использования новых информационных технологий. Исходя из всего выше сказанного, можно сделать вывод о том, что сама задача проектирования БРЛС является сложной и многогранной (включает много задач и еще больше решений, среди которых следует выбрать одно), т.о. рассмотреть ее в полной мере в курсовой работе не представляется возможным. В связи с этим, были лишь отмечены некоторые проблемы и решения. Список использованных источников 1. Гоноровский И. С., Радиотехнические цепи и сигналы, 2 изд., М., 1971. 2. Гуткин Л. С., Теория оптимальных методов радиоприёма при флуктуационных помехах, М., 1972. 3. Канащенков А.И., Меркулов В.И., Самарин О.Ф., Облик перспективных бортовых радиолокационных систем. Возможности и ограничения, М.: ИПРЖР, 2002. 4. Финкельштейн М. И., Основы радиолокации, 2 изд., М.: Радио и связь, 1983. 5. Горкин В.Н., Расчет системных параметров РЛС: методические указания к лабораторной работе, Рязань: РГРТА, 2005. 6. Федоров В.А., Методы и устройства обработки сигналов в импульсно-доплеровских радиолокационных станциях, Рязань: РГРТА, 2006. 7. Перунов Ю.М., Фомичев К.И., Юдин Л.М., Радиоэлектронное подавление информационных каналов систем управления оружием, М: Радиотехника, 2003. |
|||||||||||||||||||
Страницы: 1, 2
 |
||
| НОВОСТИ |  |
|
|
||
| ВХОД | |
|
|
|||||
Рефераты бесплатно, реферат бесплатно, курсовые работы, реферат, доклады, рефераты, рефераты скачать, рефераты на тему, сочинения, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||