|
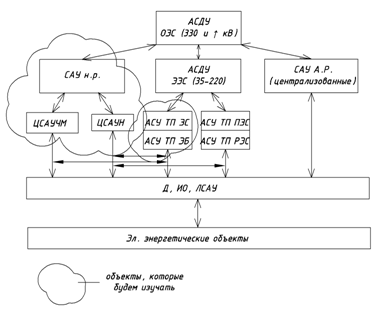
Контрольная работа: Автоматические системы управления в энергетикеЭта задача ещё называется третичным регулированием. Решается с помощью многовариантных расчётов на ЭВМ. Ещё наз-ся оптимизация режима работы эл. станций и эн. систем. 3. Уровень суток или недели.Задача состоит в использовании имеющихся эн. блоков тепловых эл. станций таким образом что бы ↓ число пусков и остановов эн. блоков. 4. Уровень года или нескольких лет.Задача состоит в планировании остановов эн. блоков ТЭС на несколько недель для проведения ежегодных ремонтных работ. 5. Уровень нескольких лет.Основная задача планирование строительства новых энергоблоков, ст., п/ст., ЛЭП и поставок оборудования. 3, 4, 5 уровни не относятся к оперативно-диспетчерскому управлению. Это управление в плане планирования (мы не рассматриваем). Структура технологического управления в электроэнергетике.Технологическое управление – это оперативное управление производством, передачей и распределением эл. энергии. Оперативное управление реализуется диспетчерскими службами. Сейчас все диспетчерские службы оснащены автоматизированными системами управления технологическим процессом в электроэнергетике. Кроме того в область действия и диспетчерских служб и АСУ ТП входят ЛСАУ, установленные на электроэнергетических объектах. Есть 3 основных группы задач, которые возлагаются на диспетчерские службы АСУ ТП (а значит и на ЛСАУ): 1) обеспечение постоянного необходимого качества питания всех потребителей эл. эн. в любой точке энергосистемы, что требует постоянного оперативного управления частотой, напряжением и мощностью; 2) Осуществление оптимального использования оборудования эл. станций, эл. сетей; 3) Осуществление мер оп ликвидации последствий аварий и восстановления нормальной работы эн. систем, а также осуществление мер по предотвращению аварий. Структурная схема. ЭЭС – электроэнергетические системы (8 шт.); ПЭС – предприятия эл. сетей 35 – 220 кВ (сейчас обл. энерго); ЭБ – энергоблоки (300 МВт и ↑ → АСУ ТП); РЭС – районы эл. сетей; Д – датчик; ИО – исполнительные органы; ЛСАУ. ЦСАУЧМ – централизованная САУ частотой и мощностью; ЦСАУН -- централизованная САУ напряжением (управл. U и Q)
В состав автоматизированного технологического управления эл. эн. системы кроме автоматизированных систем управления входят и автоматические системы управления. Есть 2 группы таких систем: САУ нормальным и САУ аварийным режимами (Н.Р. и А.Р,). Устойчивость параллельной работы СГ энергосистемы → САУ А.Р. Основные сведения о САУ Н.Р. (нормальным режимом).ЦСАУЧМ – предназначена для регулирования частоты в эл. эн. системе на заданном уровне путём поддержания баланса активной мощности в системе. Эта централизованная система регулирования частоты только за счёт изменения генерирующей мощности.
Состоит эта система из центральной части и нескольких станционных частей. На Украине в составе АСУ ОЭС имеется программно-вычислительный комплекс CSADA в состав которого входит ЦСАУЧМ. На Украине в качестве ЧРЭС используется 4 ГЭС (Днестровская, Днепровская, Кременчугская, Днепродзерджинская) и 1 ТЭС (Змеевская (Донбас)). Для качественного регулирования частоты и мощности к регулированию должны привлекаться практически все ТЭС. У нас не привлекаются из-за изношенности оборудования и отсутствия развитой системы управления (нет каналов связи, денег). ЦСАУН – предназначена для поддержания напряжений в контролируемых узлах эл. сети 110 и ↑ кВ на заданном уровне и для обеспечения при этом заданных перетоков мощности по ЛЭП. Основные задачи АСУ ТП эл. станций.Задачи управления (технологического (оперативного)). Классификация задач. - По технологическому принципу. 1) задачи управления эл. частью; 2) задачи управления тепловой частью; 3) задачи управления вспомогательным хозяйством станции; - По типу управления: 1) Контроль и диагностика состояния оборудования; 2) Регулирование параметров режима; 3) Ведение и оптимизация режима. 1. Контроль и диагностика состояния оборудования.Задачи контроля (большинство задач на Украине этим ограничивается). Контроль – сравнение измеренных значений переменных состояния с заданными допустимыми значениями. Стандартная схема контроля. Дискретные измерения значений. ОП – оперативный персонал; ИО – исполнительные органы.
Краткая характеристика задач диагностики. Под задачей диагностики в АСУ понимают расчётный показатель работоспособности оборудования на основе измерений. Пример задачи диагностики. Диагностика выработки коммутационного ресурса ВВ Все ВВ характеризуются коммутационным ресурсом – max допустимое кол-во коммутаций выключателя в различных диапазонах коммутируемых токов. Решение задачи выработки коммутационного ресурса основано на формуле, определяющей расход ресурса за единичную коммутацию:
Суммарный ресурс: Задачи контроля и диагностики в плане управления реализуются через оперативный персонал, т.е. персонал принимает решения по управлению на основе данных контроля и диагностики. По этому в этих задачах управление осуществляется с задержкой во времени. Краткая характеристика задач регулирования.Задача регулирования это задача, которая преимущественно формирует управленческие воздействия с целью вернуть значения переменных состояния к заданы значениям при отклонениях. Воздействие осуществляется автоматически без задержки во времени.
Основное – устойчивая работа системы. Есть системы в которых Краткая характеристика задач ведения и оптимизации режимов эл. ст.Задачи ведения режимов это задачи, которые последовательно во времени изменяют состояние или режим технологического объекта управления по заранее определенной последовательности действий. Пример – пуск или останов эн. блока вывод в ремонт выключателя на РУ и т.д. Задачи оптимизации режимов рассчитывают такие
значения режимных параметров, при которых обеспечивается min или max некоторого
показателя качества работы технологического объекта управления. Результаты
задач оптимизации являются заданными значениями для задач регулирования Схема взаимодействия меж задачами контроля и диагностики состояния эл. оборудования, регулирования параметров режима, ведения и оптимизации режима.В контуре управления АСУ ТП в настоящее время кроме задач контроля, диагностики регулирования, оптимизации и ведения режимов предусматривают группу задач "советчик диспетчера". Эта группа задач вырабатывает рекомендации – советы по принятию решений оперативным персоналом в различных режимных ситуациях на эл. станциях. Сейчас группу задач "советчик диспетчера" называют системой интеллектуального принятия решений (СИПР) оперативным персоналом. СИПР основана на мат. методах и моделях теории нейронных сетей (теория искусственного интеллекта). 3. Управление частотой и активной мощностью в нормальных режимахэлектростанция управление автоматизированный энергетический Статическая характеристика турбоагрегатаВ установившемся режиме должен обеспечиваться баланс
активной мощности:
Q – расход энергоносителя (пара или Н – давление пара (для ГЭС напор η – КПД турбоагрегата; ω – механическая скорость вращения вала.
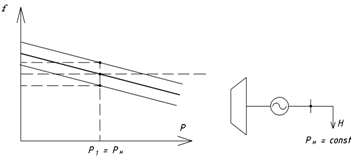
Рассмотрим турбину с постоянной мощностью В этом случае: Статическая характеристика – не зависит от времени. Если Фиксированных положений РК может быть множество и для каждого состояния своя моментно-скоростная характеристика. Пределы характеристики: - справа – при полностью открытых РК; - слева – при устойчивой работе (тех. min по мощности. Технологический минимум электростанции — минимальная нагрузка электростанции, обеспечивающая безопасное для персонала, оборудования, потребителя и окружающей среды состояние работы электростанции, включающая в себя технический минимум собственного оборудования и минимально необходимую нагрузку, обеспечивающую технологический минимум потребителей). Статическая нагрузка по частотеСтатической характеристикой эл. приёмника по частоте
называется зависимость меж мощностью, потребляемой эл. приёмником и частотой: 3 группы эл. приёмников: 1)
эл. приёмники, у которых Р не зависит
от частоты: 2)
эл. приёмники, у которых Р зависит от
частоты в первой степени 3)
эл. приёмники, у которых потребляемая
мощность зависит от частоты во второй и выше степени: В каждом узле нагрузки есть эл. приемники всех трёх типов.
Можно построит эквивалентную статическую характеристику по частоте узла
нагрузки, либо района эн. системы, либо всей энергосистемы в целом.
Эквивалентные статические характеристики нагрузки определяются той группой
электроприёмников которая составляет большее количество. В современных эл. эн.
системах наибольшее кол-во-эл. приёмники второй группы. По этому эквивалентная
статическая характеристика нагрузки в пределах Статические характеристики по частоте называют также
регулирующим эффектом нагрузки (РЭН). РЭН является различным для различных эн.
систем, для различных узлов нагрузки, для одного узла или системы но в разное
время суток. Рассмотрим некоторую эквивалентную характеристику для некоторой эн. системы. Допустим, что к этой системе произошло подключение нового объема эл. приёмников. Предположим при этом что процентное соотношение меж приемниками различных типов не изменилось. При изменении состава эл. приёмников изменяется наклон статической характеристики нагрузки. Наклон определяется статическим коэффициентом нагрузки, который в о.е.:
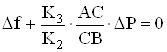
Определим Мощность нагрузки создаёт тормозящей момент нагрузки на
валах эл. ст. Изменение момента нагрузки В т. пересечения – уст. режим – равенство ускоряющего
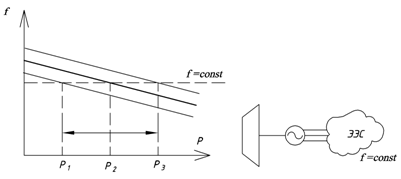
момента турбины и тормозящего момента нагрузки. При реальных изменениях нагрузки в эн. системе Статическая характеристика регулируемой турбины по частотеНагрузка увеличивается от Н1 до Н2 на
величину Для изменения мощности турбины используются АРЧВ турбины.
Это первичное регулирование частоты в эн. системе. Характеристика 7 – 5
статическая характеристика регулируемой турбины по частоте. Также
характеристика 7 – 5 называется астатической характеристикой. Каждая
точка на ней соответствует разному значению мощности и разному положению
регулирующих клапанов. По этому эту характеристику изображают в координатах На всех ТЭС (и АЭС) применяют статические х-ки. На ГЭС стат. и астат. х-ки. Рассмотрим стат. х-ку регулируемой турбиныТочку х.х. ещё называют уставкой АРЧВ по частоте. Наклон
стат. х-ки регулируемой турбины определяется коэффициентом статизма σ.
σ можно определить послед. формуле: σ регулируемых ТА-ов нормируются:
Стат. х-ку регулируемой турбины можно математически записать так:
Значение σ в% обозначает следующее: что бы нагрузка ТА изменилась от 0 до номинальной надо что бы частота снизилась в СНГ на 4.5%. Пример определения изменения мощности ТА при изменении частоты в системе.
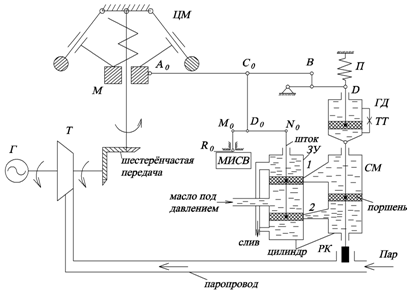
АРЧВ бывают 3 типов: 1) гидромеханические; 2) гидродинамические; 3) электрогидравлические. 1) и 2) на тепловых (паровых) ТА, 3) на паровых и гидравлических агрегатах. Основные функции АРЧВ: 1) регулирование частоты вращения турбины (при этом регулируется и мощность турбины); 2) пуск и останов турбины; 3) изменение частоты вращения при синхронизации; 4) распределение нагрузки меж параллельно работающими агрегатами (эн. блоками); 5) участие в общесистемном регулировании частоты; 6) режимные ограничения мощности турбины (все АРЧВ снабжены защитными устройствами, которые ограничивают мощность турбины до заданной величины). Простейший гидромеханический АРЧВПринципиальная схема
Г – СГ; ЦМ – центробежный маятник; М – муфта на вращающемся валу ЦМ-ка. Положение муфты проградуировано по скорости турбины и определяет скорость вращения турбины. ЦМ и шестерная передача – это ДЧ (датчик вращения турбины). используется для маломощных ТА (30 МВт и ↓). МИСВ – механизм изменения скорсти вращения турбины. С
помощью МИСВ можно изменять и фиксировать рычаг ЗУ – золотниковое устройство – распределяет подачу масла на выходных каналах 1 и 2. Верхний и нижний полости ЗУ связаны со сливной трубкой. СМ – сервомеханизм (исполнительное устойство); ЗУ + СМ – гидроусилитель. Краткое описание работыДопустим скорость вращения турбины ↓. ЦМ вращается
медленнее → М (муфта) сместится вниз. При этом вниз переместится Установившееся положение СМ будет отличатся от исходного. Мощность Т тоже отлична от исх. С0 и золотник вертаются в исх. положения. Между положением РК-нов, положения поршня сервомеханизма и т. С рычажной передачи АСВ существует однозначная жесткая связь, обусловленная жесткими рычагами, связывающим т. В с поршнем сервомеханизма и РК-ми. Эта жесткая связь (ЖОС) АРЧВ. Такая конструкция не может поддерживать постоянство частоты вращения. Такая х-ка статическая (с наклоном).
Из Механизм изменения скорости вращения АРЧВ.МИСВ АРЧВ это устройство с помощью которого можно изменить уставку по частоте (частоту х.х) и вызвать перемещение стат. х-ки АРЧВ параллельно самой себе. СДУ – схема диспетчерского управления
В реальных условиях АРЧВ от 3 до 6%. Изменения достигаются
путём изменения и фиксации длины рычага Изменение МИСВ снабжают ручным устройством для изменения длины рычага
Действие МИСВ в двух режимах:1) параллельная работа агрегатов в эн. системе в которой частота поддерживается неизменной.
2) Работа ТА на выделенную автономную нагрузку. Изменение уставки МИСВ приводит к изменению частоты. Внешние воздействия по управлению на АРЧВ осуществляется через МИСВ.
АРЧВ с астатической частотной характеристикойВ рассмотренной ранее конструкции АРЧВ между точкой В и положением РК имеется жесткая рычажная связь которая называется ЖОС. Для получения астатической характеристики регулирования вместо ЖОС применяют ГОС. Схема ГОС имеет следующий вид:
З – золотник. ГОС состоит из П и гидравлического демпфера (ГД). П + ГД – изодронное устройство = ГОС. ГД – это цилиндр, заполненный маслом с поршнем. Вверх и нижняя части цилиндра сообщаются через трубку с малым регулируемым отверстием. ТТ – тонкая трубка. Работа изодромного устройстваПосле изменения нагрузки турбины, начинается перемещение
штока сервомеханизма (СМ). Например, вверх. Поскольку шток жестко связан с
корпусом ГД то ГД перемещается вверх и сжимает пружину (П). П. давит на поршень
ГД, но медленно из-за тонкой трубки. т. D медленно вверх.
Постепенно масло из нижней части в верхнюю. П. разжимается. т. D – вниз. После
п.п. т. D в исходное состояние. т В-тоже в исходное состояние. |
|||||||||||||||||||
Страницы: 1, 2
 |
||
| НОВОСТИ |  |
|
|
||
| ВХОД | |
|
|
|||||
Рефераты бесплатно, реферат бесплатно, курсовые работы, реферат, доклады, рефераты, рефераты скачать, рефераты на тему, сочинения, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||


 , где
, где  .
. , где
, где  , где
, где  .
. это
недопустимо.
это
недопустимо.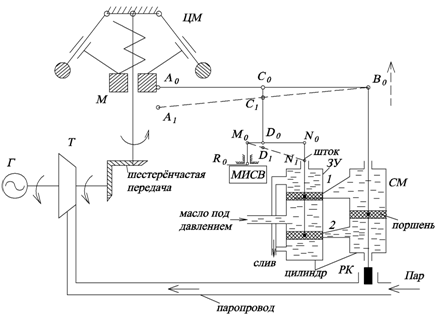
 ,
,  коэффициент статизма.
коэффициент статизма.